Stable shoemaking robot
A robot and stable technology, applied in shoe-making machinery, beating machines, footwear, etc., can solve problems such as difficulty in manual control of mechanical movement and removal, easy injury and operator's hands, time-consuming and labor-intensive, etc., to improve accuracy and The effect of stability, reducing labor intensity and convenient operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
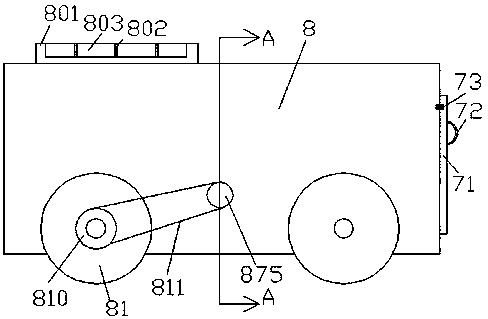
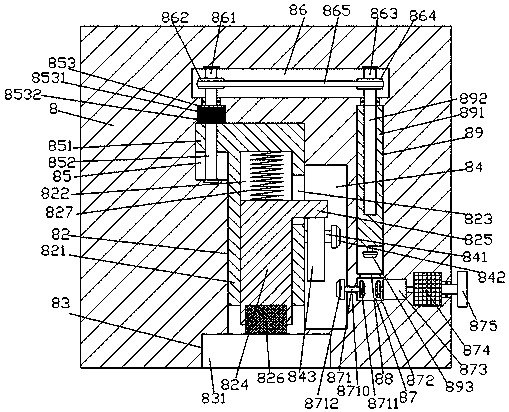
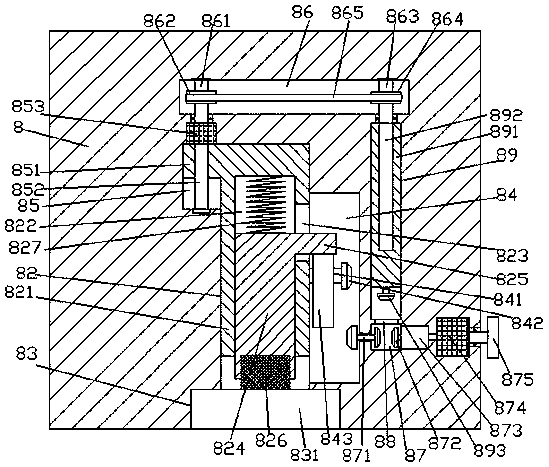
[0020] Such as Figure 1-Figure 4 As shown, a stable shoe-making robot of the present invention includes a fuselage 8 and a rolling wheel 81 that is arranged on the bottom of the fuselage 8, and a sinking groove 83 is provided in the bottom surface of the fuselage 8. The upper wall of the sinking groove 83 is penetrated with a take-off and landing sliding connection groove 82 extending upwards. The fuselage 8 above the lifting and landing sliding connection groove 82 is provided with a first transfer chamber 86 extending left and right. A second transfer cavity 84 is formed in the inner wall on the right side of the lift-off and landing sliding joint groove 82, and a first guide groove 85 is formed in the top of the left inner wall of the lift-off and landing sliding joint groove 82. The first guide groove The top of 85 is opposite to the bottom of the extension tail tip on the left side of the first transfer chamber 86. The first guide groove 85 is provided with a first screw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More