

Underground carry-scraper
A technology of scrapers and scrapers, applied in the field of underground scrapers, can solve problems such as inaccurate driving tracks, reduced autonomous driving performance of scrapers, and track deviations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described in conjunction with the following application scenarios.
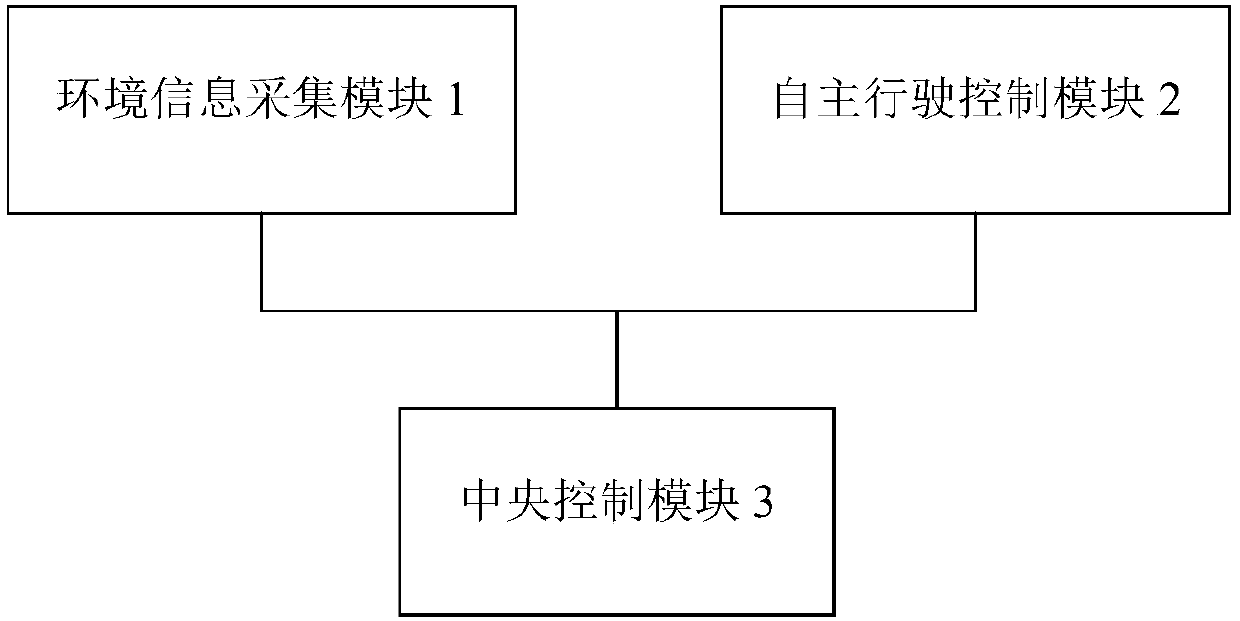
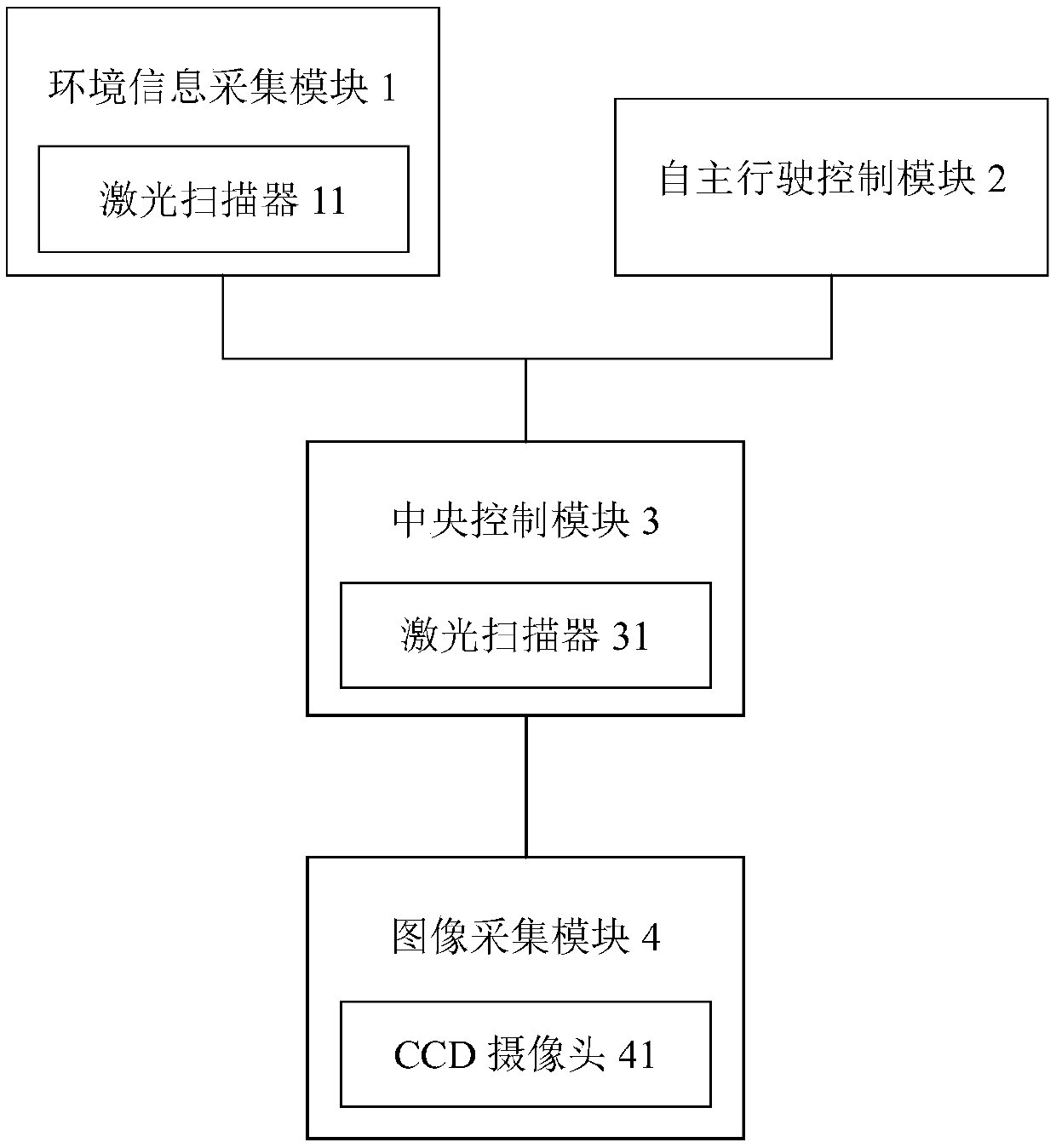
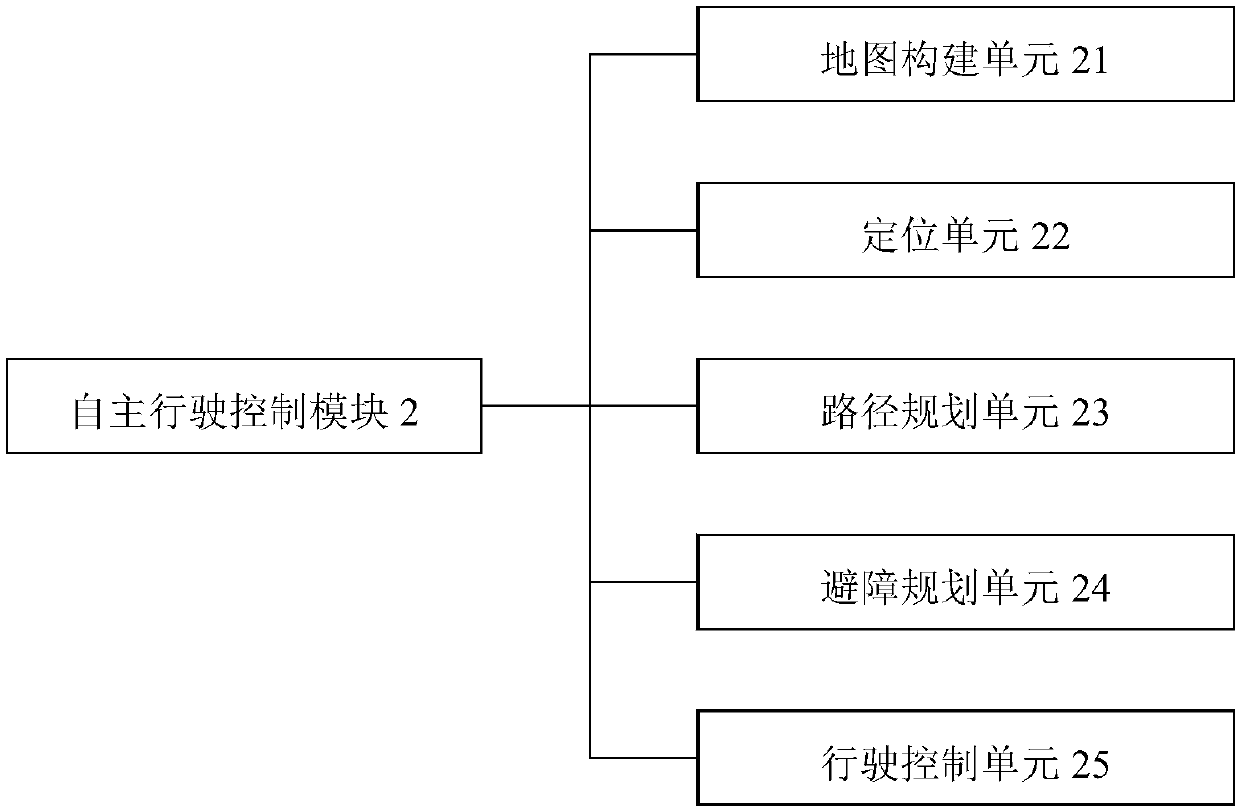
[0015] see figure 1 , figure 2 , an underground scraper, including a scraper main body, and also includes: an environmental information collection module 1, including a laser scanner 11, used to scan environmental information around the underground scraper; an autonomous driving control module 2, used to The collected environmental information constructs the underground roadway grid map, obtains the location information of the underground LHD, performs path planning according to the target area and generates driving control information, and controls the underground LHD to move to the operation target area; the central control module 3 includes the transmission Unit 31 is used for data transmission with the ground control center, sending the collected environmental information and grid map information to the ground control center, and receiving target area informa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More