

A Primary and Secondary Coordinated Control Method of Manipulator Based on Disturbance Observer
A disturbance observer and coordinated control technology, applied in the field of operation, can solve problems such as uncertain contact points, high prices, and incomplete detection information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
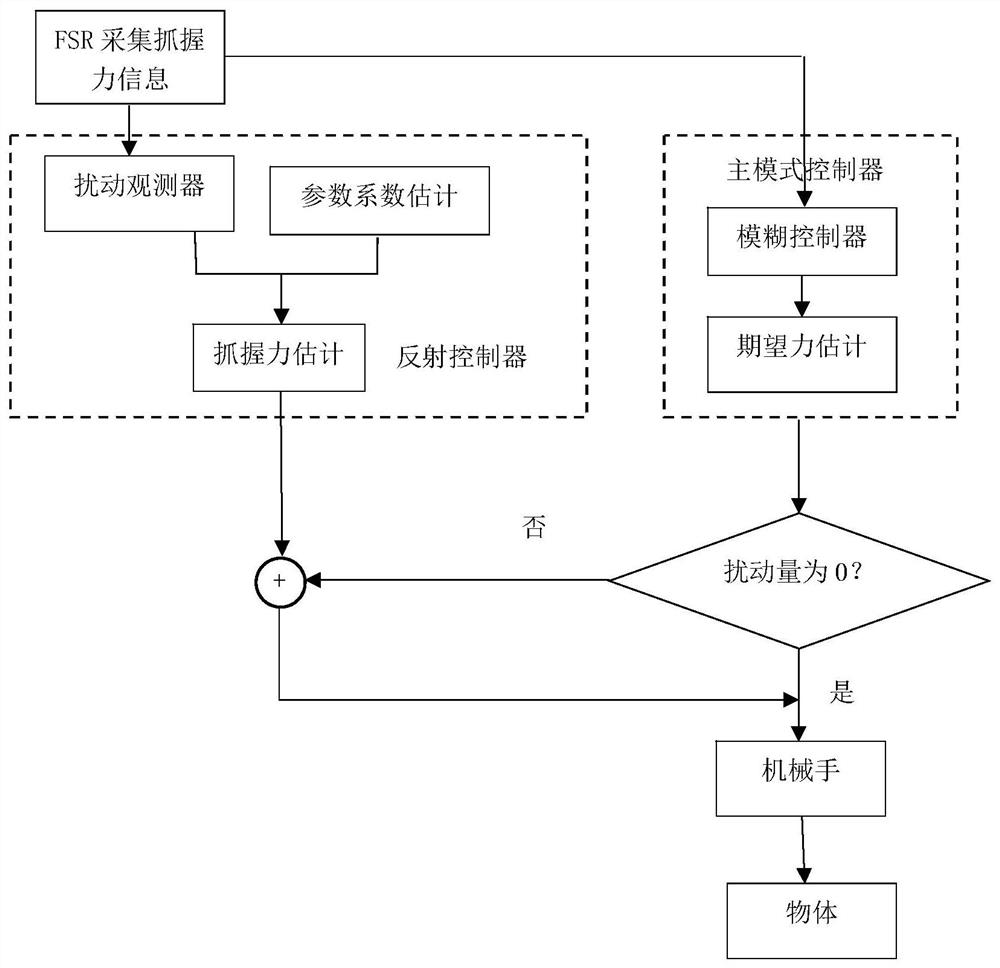
[0016] Such as figure 1 , the specific steps to establish the disturbance observer of the manipulator and the primary and secondary coordinated control method are as follows:
[0017] Step 1: Establishment of the dynamic model of the manipulator
[0018] The dynamic model of the manipulator is
[0019]
[0020] where q is the angular displacement of the joint, H(q) is the inertia matrix, is the joint torque caused by gravity, friction, etc., τ is the driving torque, r is the coupling coefficient of the driving torque to a joint of the manipulator (for a single-degree-of-freedom manipulator, r=1), J is the Jacobian matrix; The reaction force of the grasping object on the manipulator can be represented by the following model:
[0021]
[0022] Among them: x represents the position of the contact point between the manipulator and the gr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More