

Collision avoidance control method and system for automatic driving
A technology of automatic driving and control method, applied in the direction of control device, input parameters of external conditions, transportation and packaging, etc., can solve the problems of incomplete system, not considering the situation of following the car, and achieve both safety and vehicle. The effect of driving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0028] The preferred embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
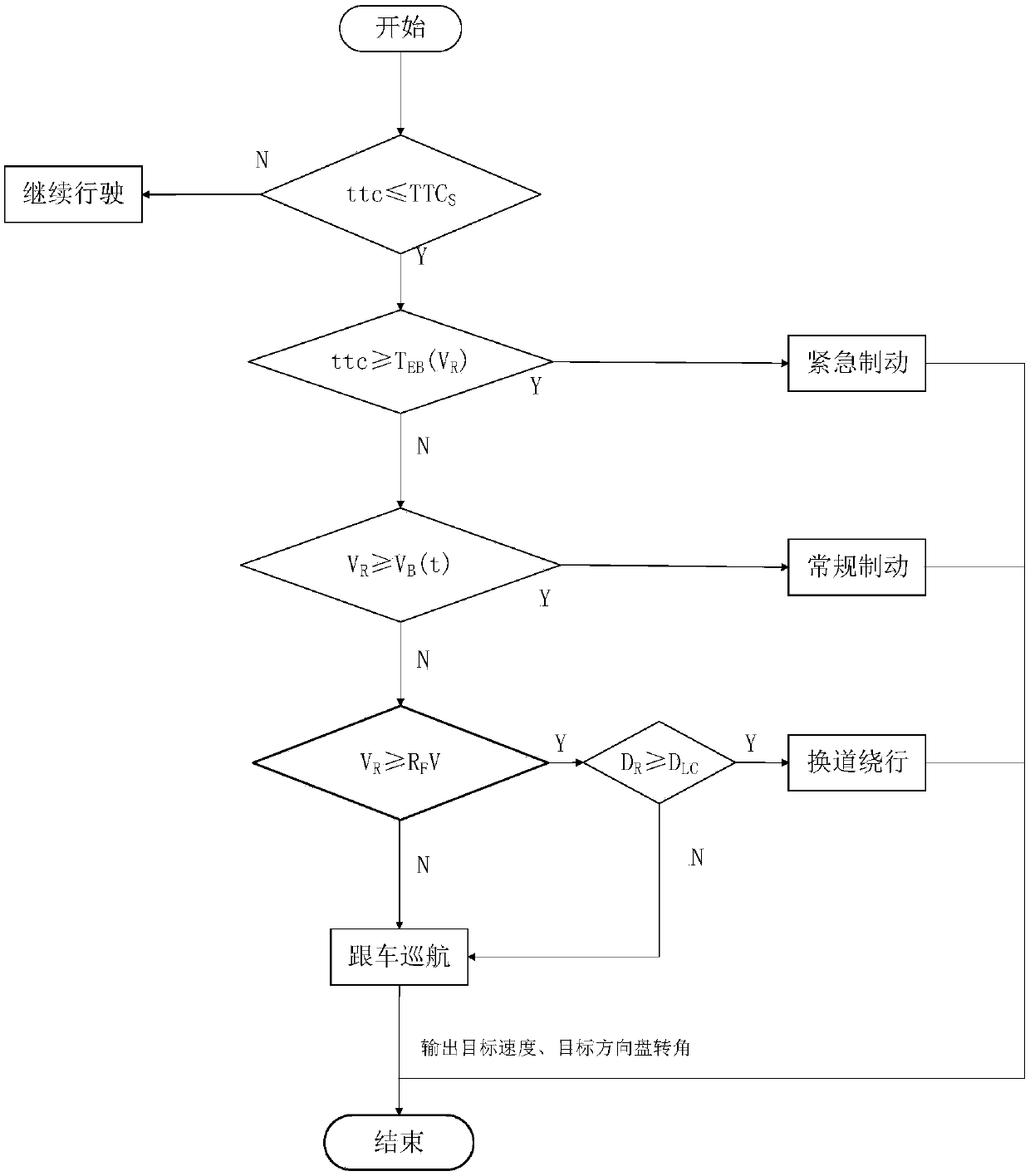
[0029] Such as figure 1 As shown, the collision avoidance control method of the present invention comprises the following steps:
[0030] After the self-driving vehicle is started, it starts to run the safety collision avoidance control algorithm;
[0031] Start the environment perception system to monitor the obstacles around the vehicle;
[0032] The environment perception system based on self-driving cars is mainly composed of radar, visual camera, V2X, positioning and other systems. Radar includes lidar, millimeter-wave radar and ultrasonic radar; visual cameras include high-definition cameras and high-dynamic cameras to meet different functional requirements of the system; V2X includes special equipment for 4G / 5G and DSRC / LTE-V technologies; positioning systems It is satellite positioning, inertial measurement, visual matching posit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More