Method for generating grid map used for unmanned vehicle navigation control
A grid map, unmanned vehicle technology, applied in geographic information databases, special data processing applications, structured data retrieval, etc., can solve problems such as inability to use unmanned vehicles to control decision-making, complex environments, and inability to obtain information.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The specific implementation manners of the embodiments of the present invention will be described in detail below with reference to the accompanying drawings. It should be understood that the specific implementations described here are only used to illustrate and explain the embodiments of the present invention, and are not used to limit the embodiments of the present invention.
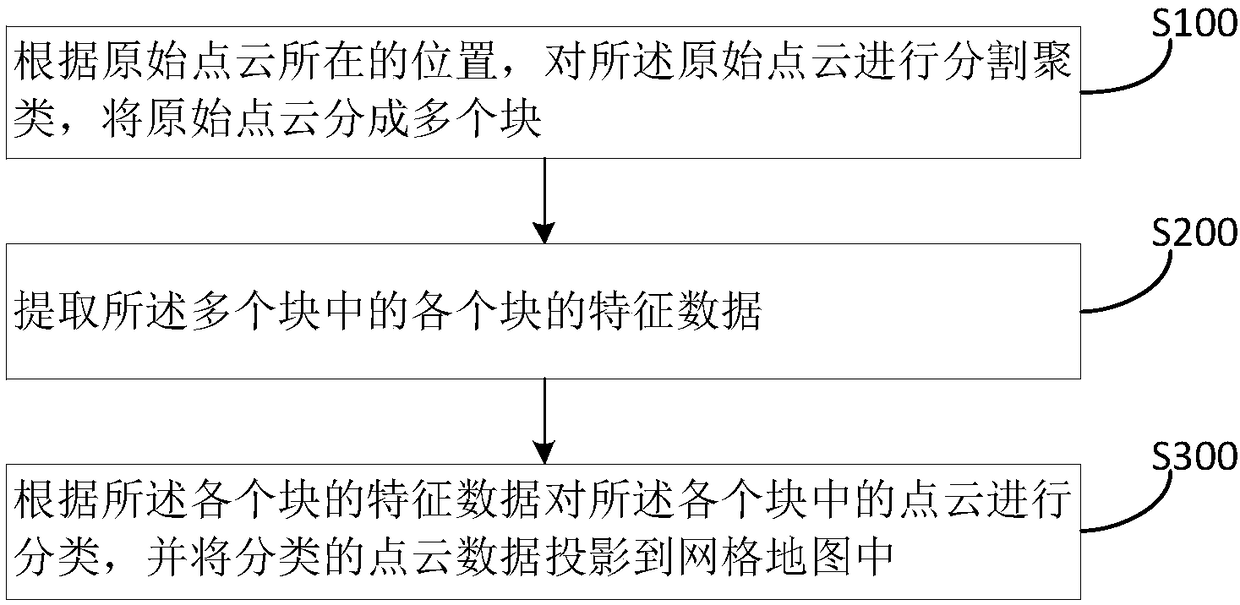
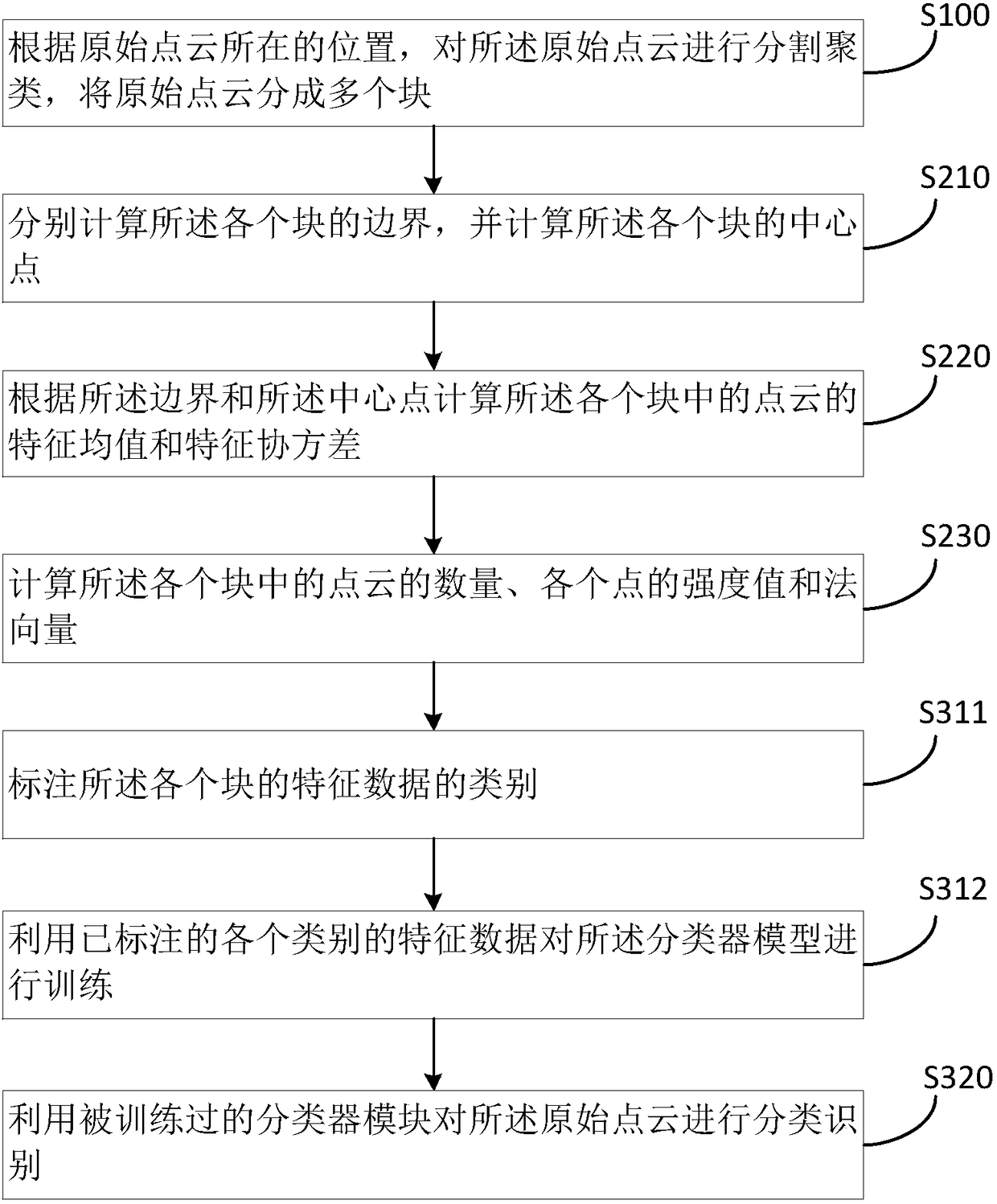
[0031] figure 1 It is a flowchart of a method for generating a grid map for unmanned vehicle navigation control according to the first embodiment of the present invention. Such as figure 1 As shown, the method includes the following steps:
[0032] In step S100, the original point cloud is segmented and clustered according to the location of the original point cloud, and the original point cloud is divided into multiple blocks. Among them, for example, the 3D point cloud obtained by lidar scanning can be projected onto the 2D plane where the unmanned vehicle is located, and the 2D plane can also...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More