

A Speed Adaptive Trajectory Tracking PID Control Method for Unmanned Vehicles
A trajectory tracking and control method technology, applied in the field of navigation and positioning, can solve problems such as poor punctuality, no effective means, unmanned vehicles contrary to the design concept and original intention of autonomy, intelligence, and efficiency, and achieve improvement Smoothness, ensuring punctuality, and improving safety effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be described in further detail below in conjunction with the accompanying drawings.
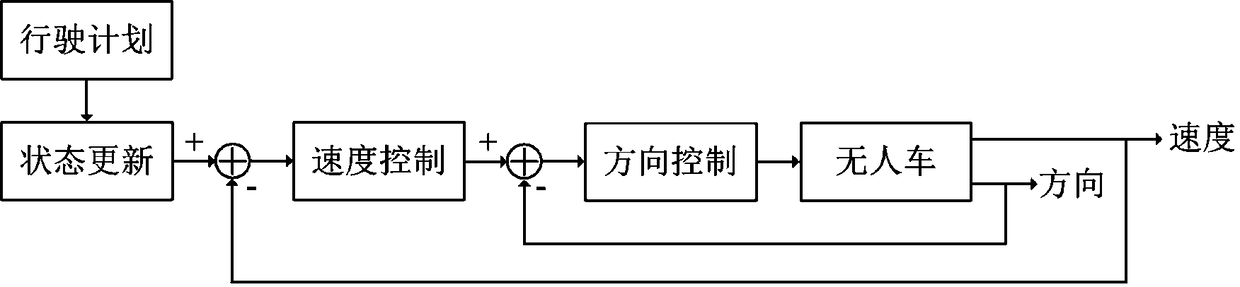
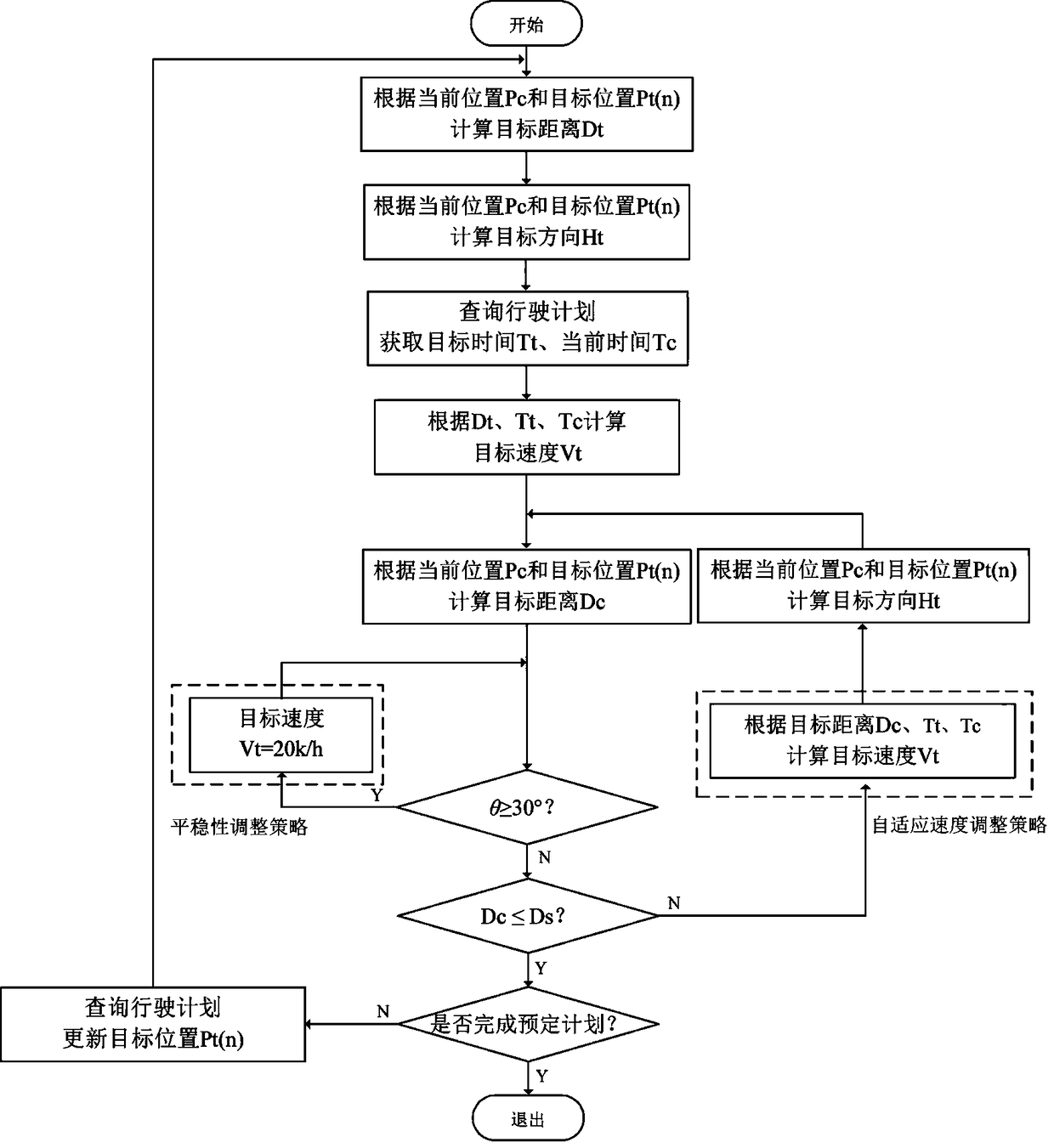
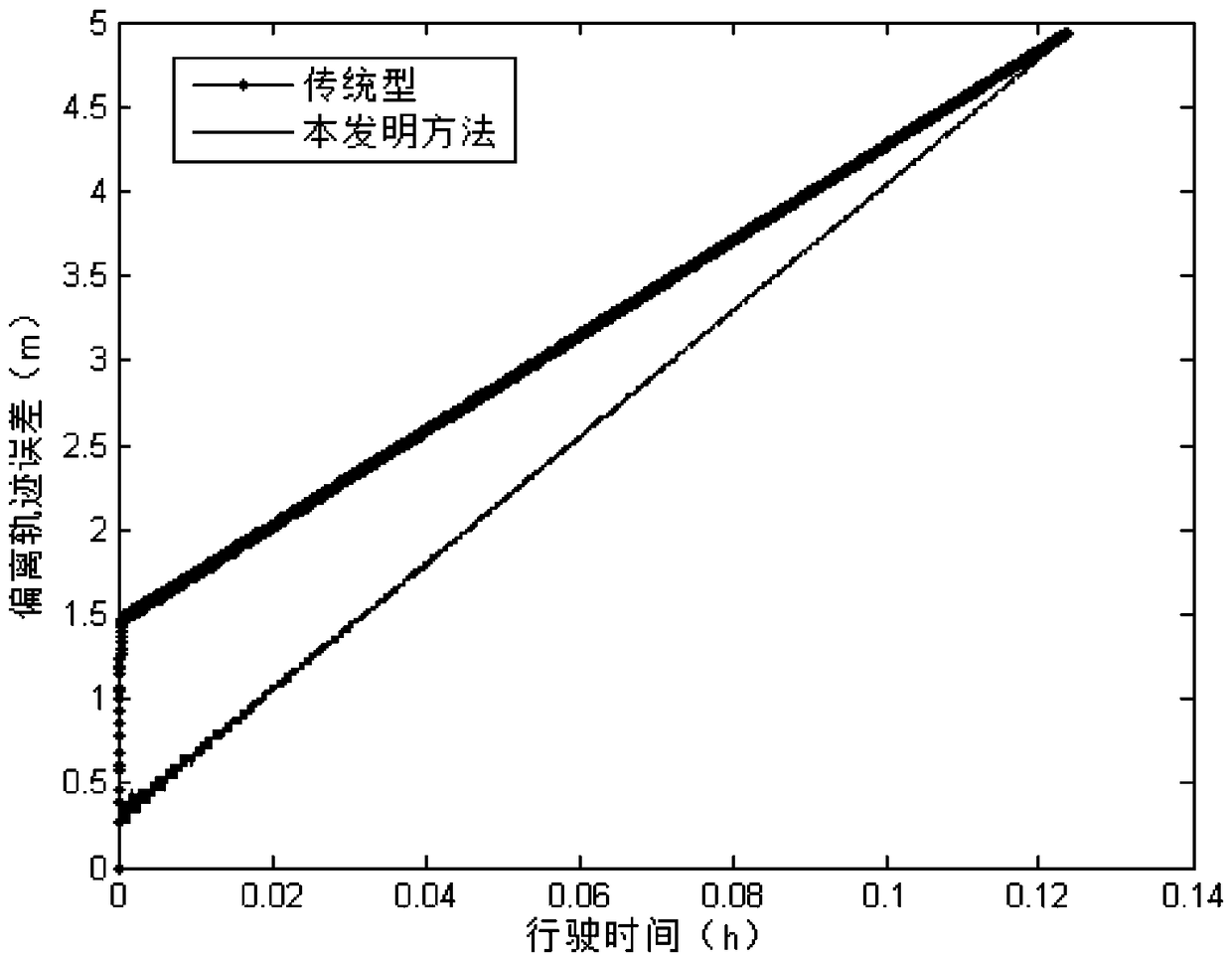
[0039] The invention discloses a speed adaptive unmanned vehicle trajectory tracking PID control method, which uses an incremental PID algorithm to realize the unmanned vehicle accurately and timely tracking the predetermined trajectory, and introduces speed adaptive adjustment to ensure that it arrives at the predetermined location on time , design stability adjustments to improve the driving stability of unmanned vehicles. During the driving process of the unmanned vehicle, according to the current position P of the unmanned vehicle c with the current target position P t (n) the distance D between t , and the current time T c and target time T t The target speed is updated in real time to realize self-adaptive speed adjustment. The specific calculation process is as follows.
[0040] Step a):
[0041] The purpose of the unmanned vehicle trajectory tra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More