

Underground high-radiation space source item surveying robot and method
A high-radiation and robotic technology, applied in radiation measurement, X/γ/cosmic radiation measurement, instruments, etc., to achieve the effect of convenient operation and resource saving
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
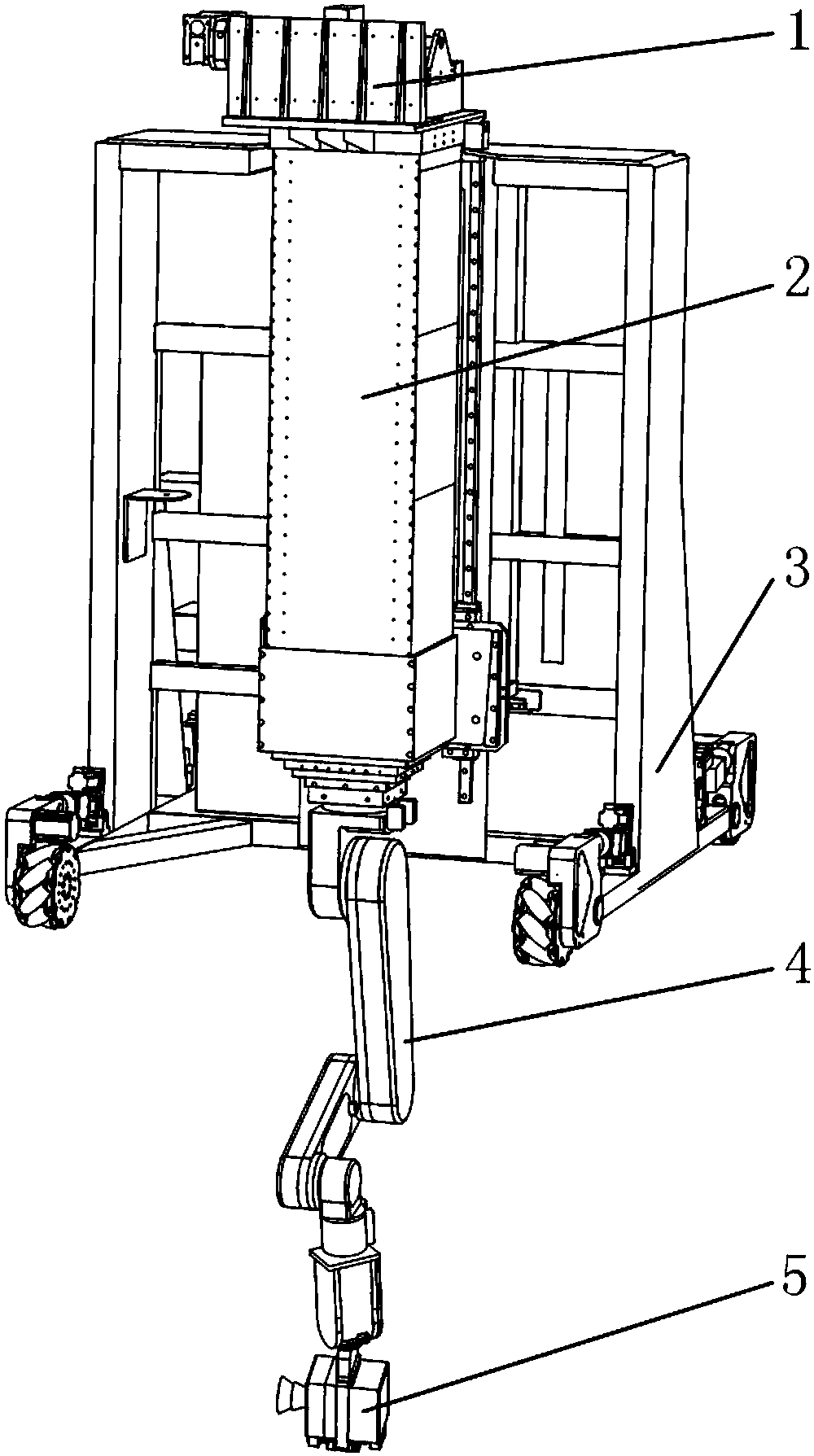
[0021] like figure 1 As shown, an underground high-radiation space source item investigation robot includes: a carrying car body 3, a lifting device 2 is installed on the carrying car body 3, and the traction device 1 provides up and down traction for the lifting device 2, and the mechanical arm 4 Installed at the end of the lifting device 2, the detector holder 5 is installed at the end of the mechanical arm 4, and the detector holder 5 clamps the detection equipment.
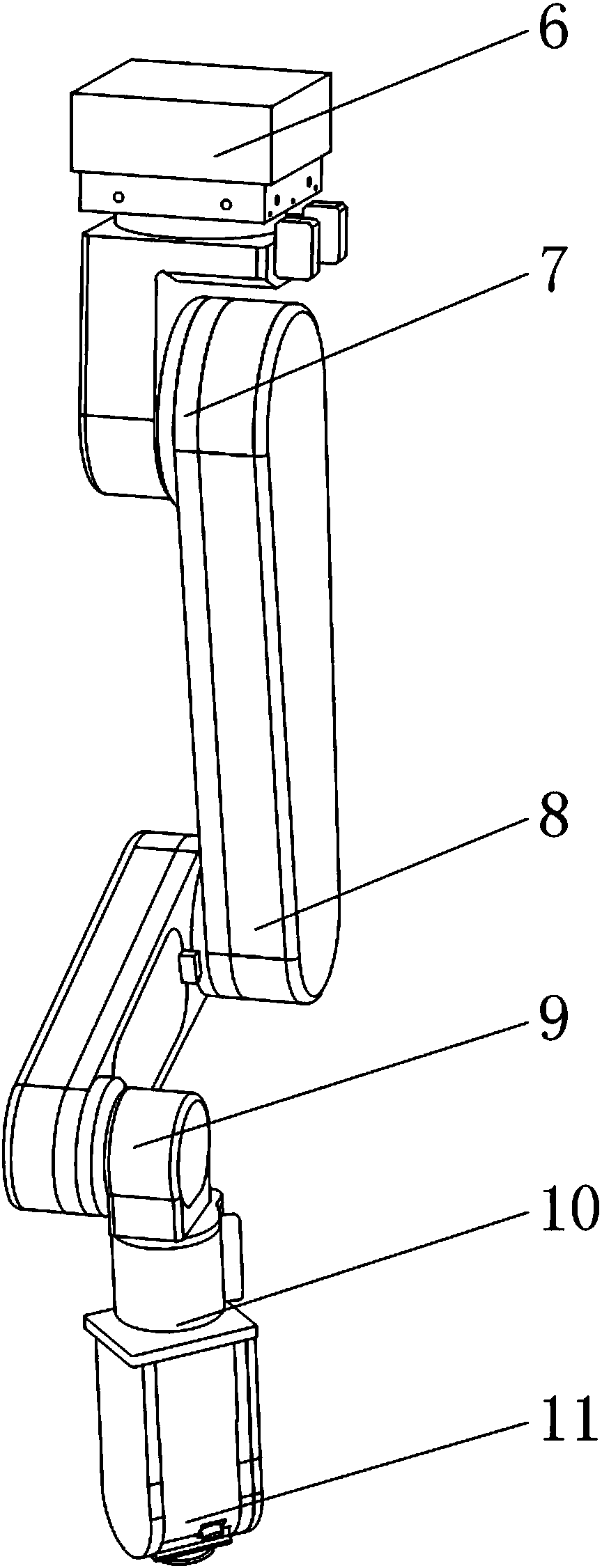
[0022] like figure 2 As shown, the mechanical arm 4 includes: joint one 6, joint two 7, joint three 8, joint four 9, joint five 10, and joint six 11 connected sequentially from top to bottom. Wherein joint four 9 and joint five 10 can be disassembled, and joint five 10 can be directly installed on the end of lifting device 2 .
[0023] A method for investigating underground high-radiation space source items: comprising the following steps
[0024] S1: Robotic arm 4 is reset to the initial state, joint 2 7,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More