

A three-legged underactuated walking device and its control method
An underactuated and walker technology, applied in the field of robots, can solve the problem of high energy consumption of four-legged underactuated robots, and achieve the effect of overcoming the defect of foot wiping, good stable performance, and solving high energy consumption.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0042] The three-legged underactuated walking device and its control method provided by the embodiments of the present application solve or partially solve the technical problem of high energy consumption of quadruped underactuated robots in the prior art.
[0043] The technical solution in the embodiment of the present application is to solve the above-mentioned technical problems, and the general idea is as follows:
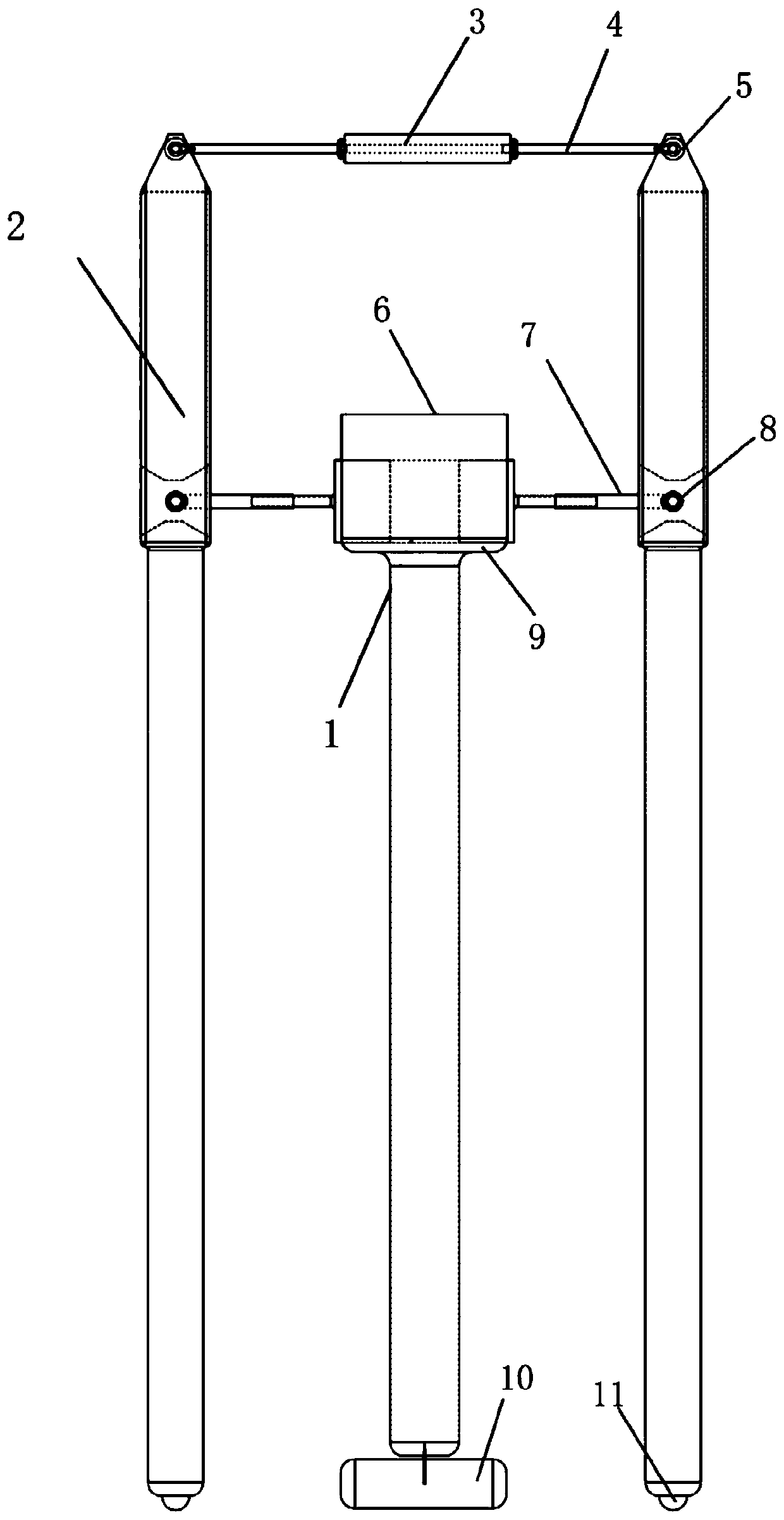
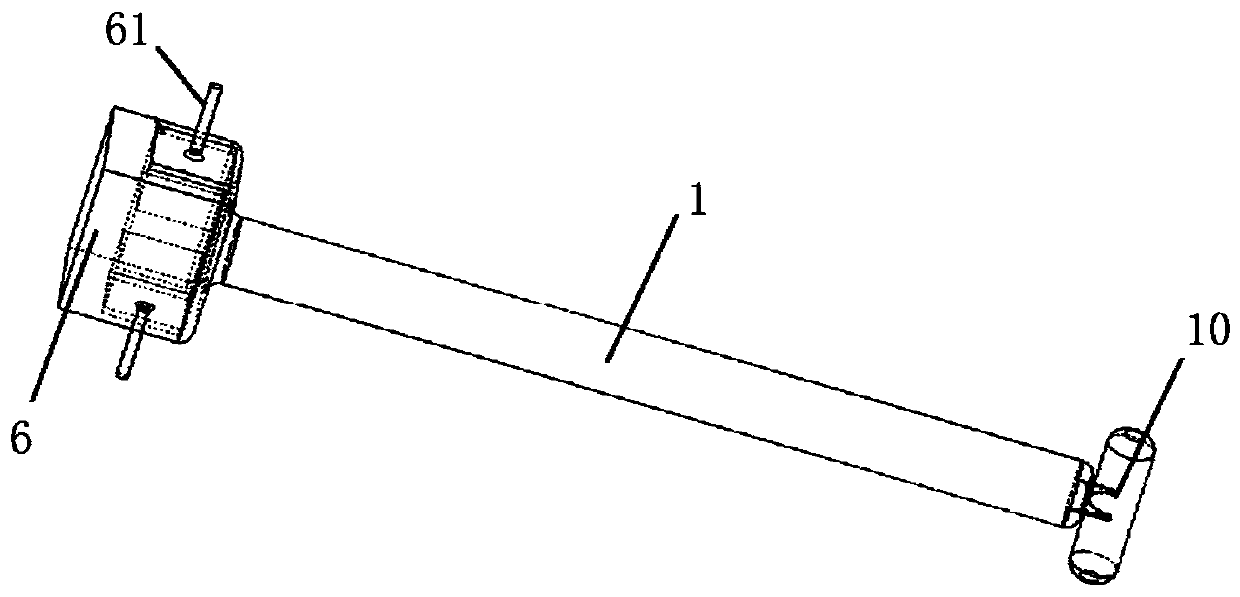
[0044] See attached figure 1 , the application adopts a three-way system consisting of an inner swing leg 1, a pair of outer swing legs 2, a push rod motor 3, a motor 6, two first T-type couplings 4 and two second T-type couplings 7. The foot underactuated walker drives the inner swing leg 1 and the outer swing leg 2 through the cooperation of the motor 6 and the push rod motor 3 to realize the two-dimensional underactuated walking of the three-legged underactuated walker. During the walking process, when the outer swing leg When 2 is a supporting leg, the mot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More