

The tracking method of underwater robot target following system based on monocular vision
An underwater robot and monocular vision technology, applied in control/regulation systems, instruments, image analysis, etc., can solve the problems of underwater robot target following, improve intelligence and autonomous operation ability, and solve expensive effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
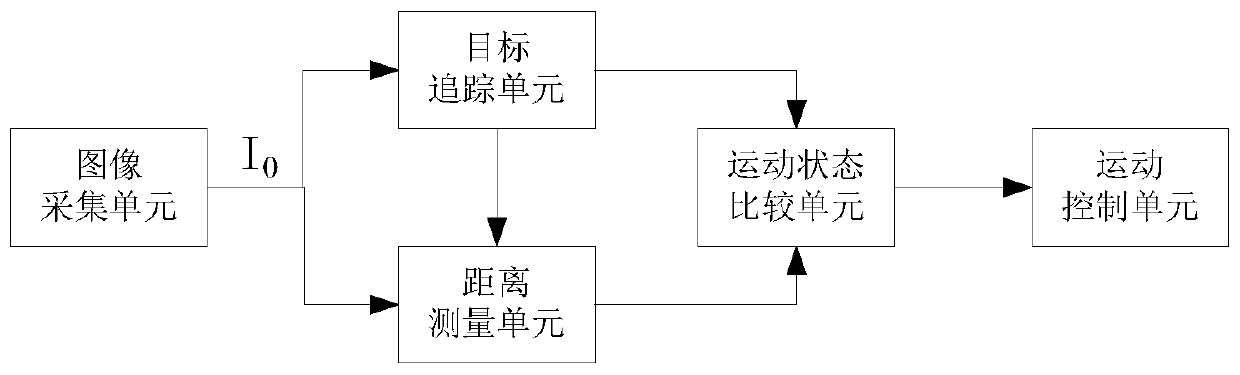
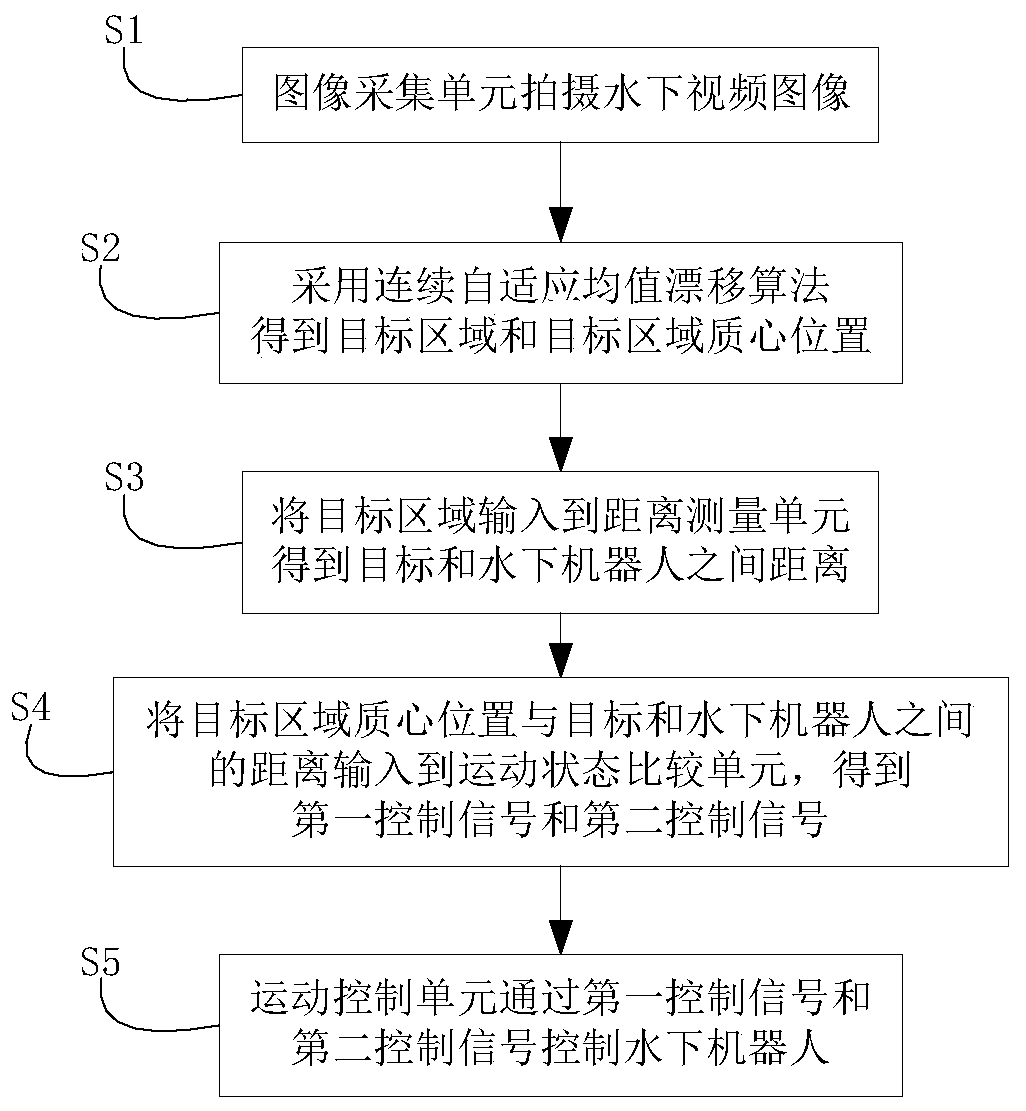
[0033] A target following system for underwater robots based on monocular vision, such as figure 1 As shown, it includes an image acquisition unit, a target tracking unit, a distance measurement unit, a motion state comparison unit and a motion control unit, the output of the image acquisition unit is connected to the input of the target tracking unit and the input of the distance measurement unit end, the output end of the target tracking unit is connected to the input end of the distance measurement unit and the input end of the motion state comparison unit, the output end of the distance measurement unit is connected to the input end of the motion state comparison unit, and The output end of the motion state comparison unit is connected to the input end of the motion control unit, wherein the image acquisition unit adopts a monocular camera for taking underwater video images, and selects a frame of image I wherein 0 , and transmit it to the target tracking unit and the dist...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More