

Combined and separated rotor and leg type mobile operation robot centralized-distributed control method
A distributed control and mobile operation technology, which is applied in the direction of finding the target control, etc., can solve the problems such as the inability to achieve combination and separation, and achieve the effects of overcoming the singularity of gesture expression, improving system efficiency, and reducing system energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further explained below in conjunction with the drawings:
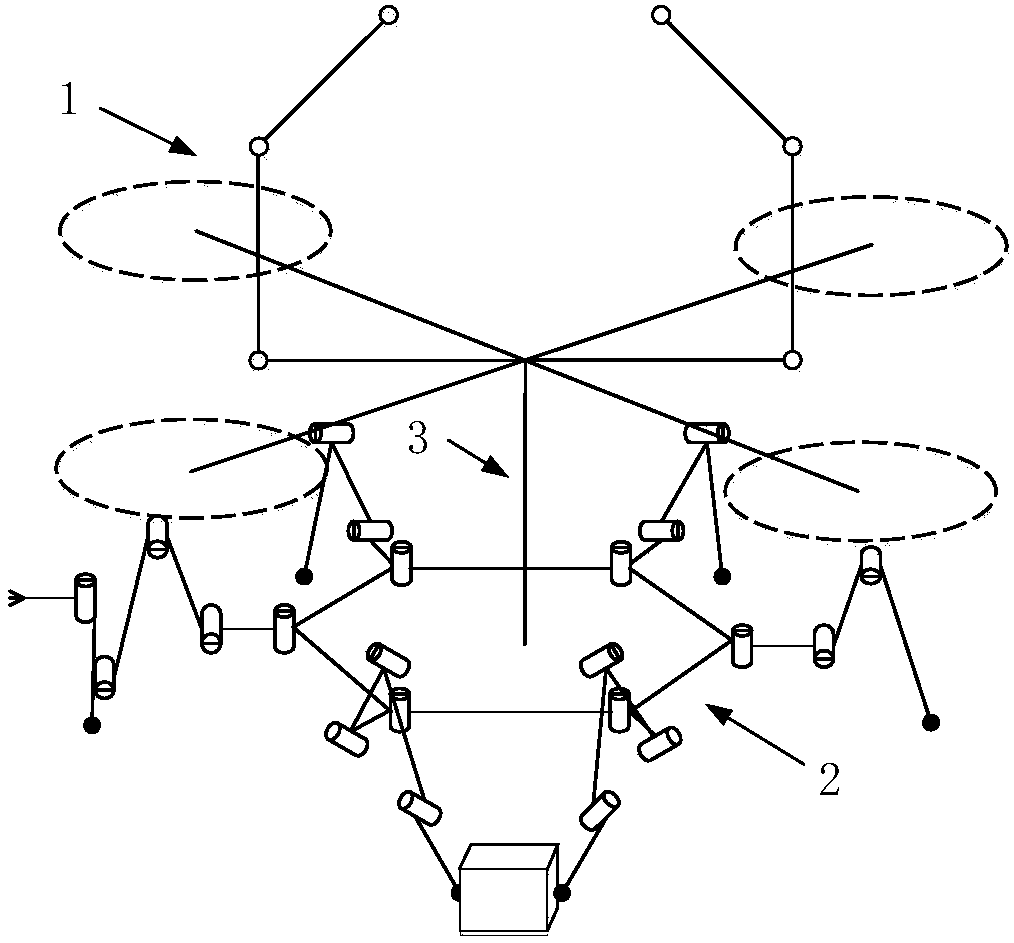
[0027] The centralized-distributed control algorithm of the combined separate rotary wing and foot-type mobile operation robot of the present invention is based on a specific hardware platform—the combined separated rotary wing and foot-type mobile operation robot, such as figure 1 Shown.
[0028] The combined and separated rotary wing and foot-type mobile operation robot is composed of a multi-rotor flying operation robot 1, a multi-legged mobile operation robot 2 and a combined separation device 3. The combination and separation device 3 is installed between the multi-rotor flight operation robot 1 and the multi-leg mobile operation robot 2 to realize the combination and separation between the multi-rotor flight operation robot 1 and the multi-leg mobile operation robot 2; make the multi-rotor flight operation robot 1 and The foot-type mobile operation robot 2 has a flight mode, a fly...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More