Full-functional training robot for wrist joints
A wrist joint and full-function technology, which is applied in the field of wrist joint full-function training robots, can solve the problems of optimization of state change training effect, inability to provide active training platform for patients, and single training mode, so as to achieve optimal training effect and rehabilitation training effect Good, the effect of multiple rehabilitation training modes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
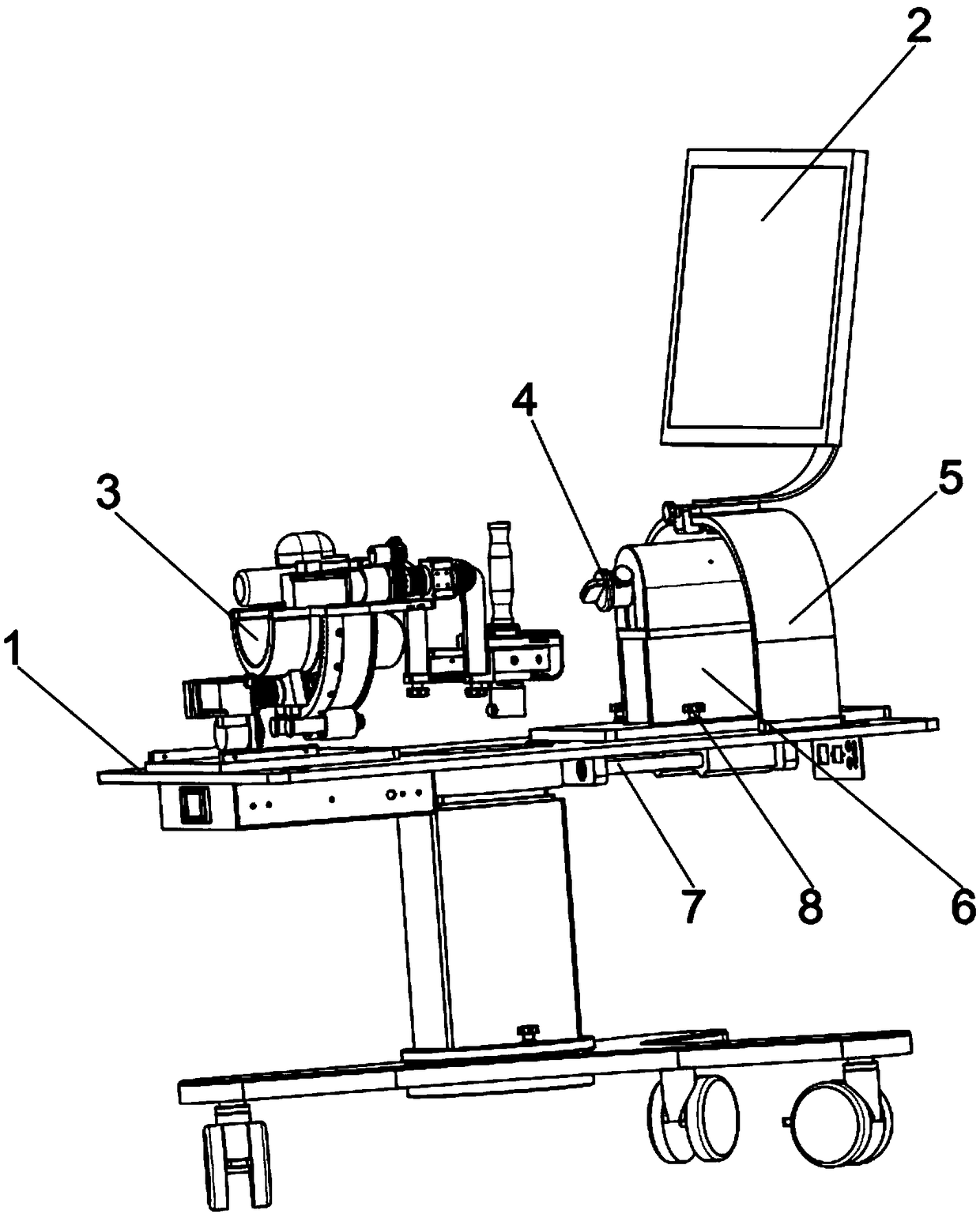
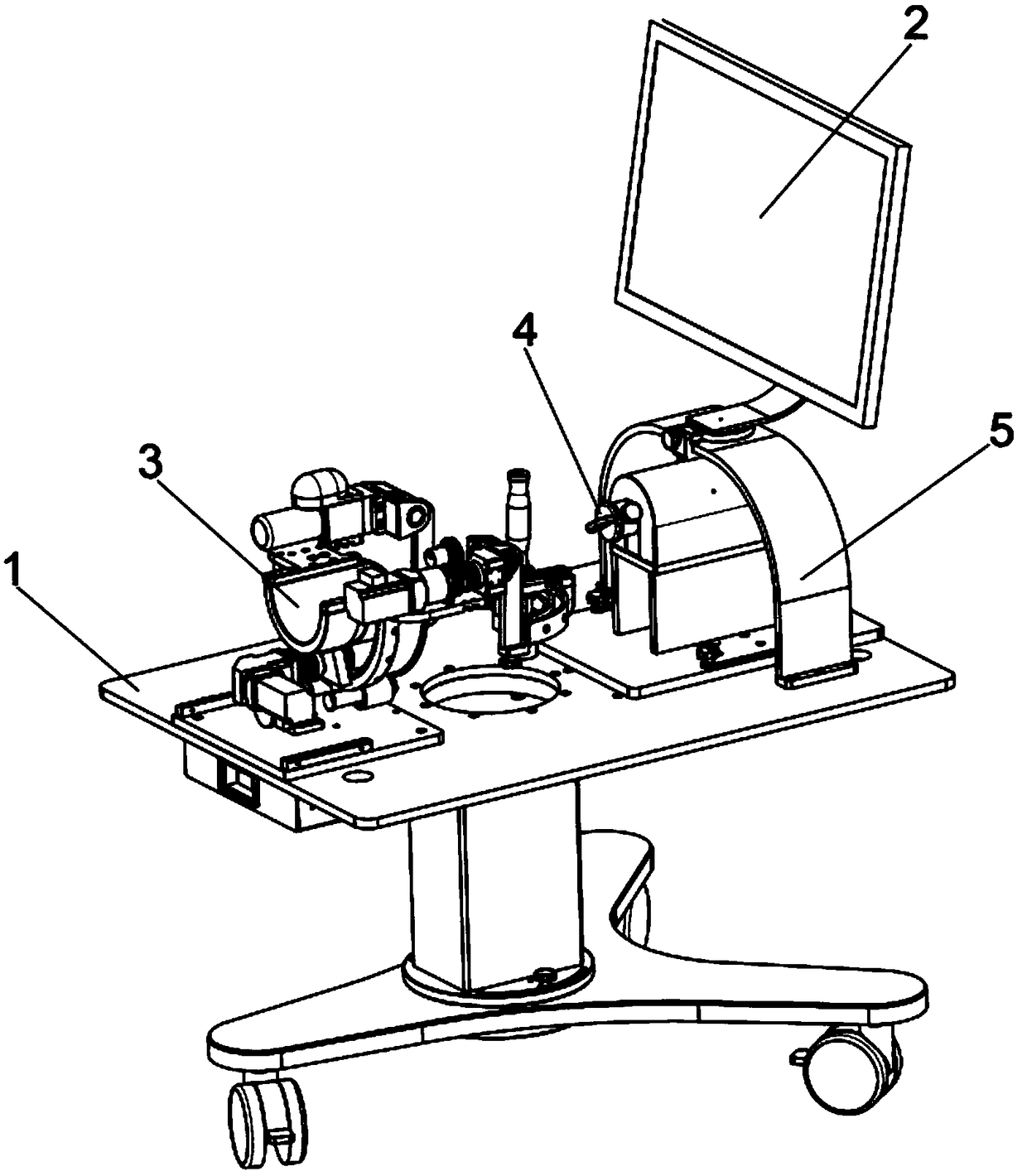
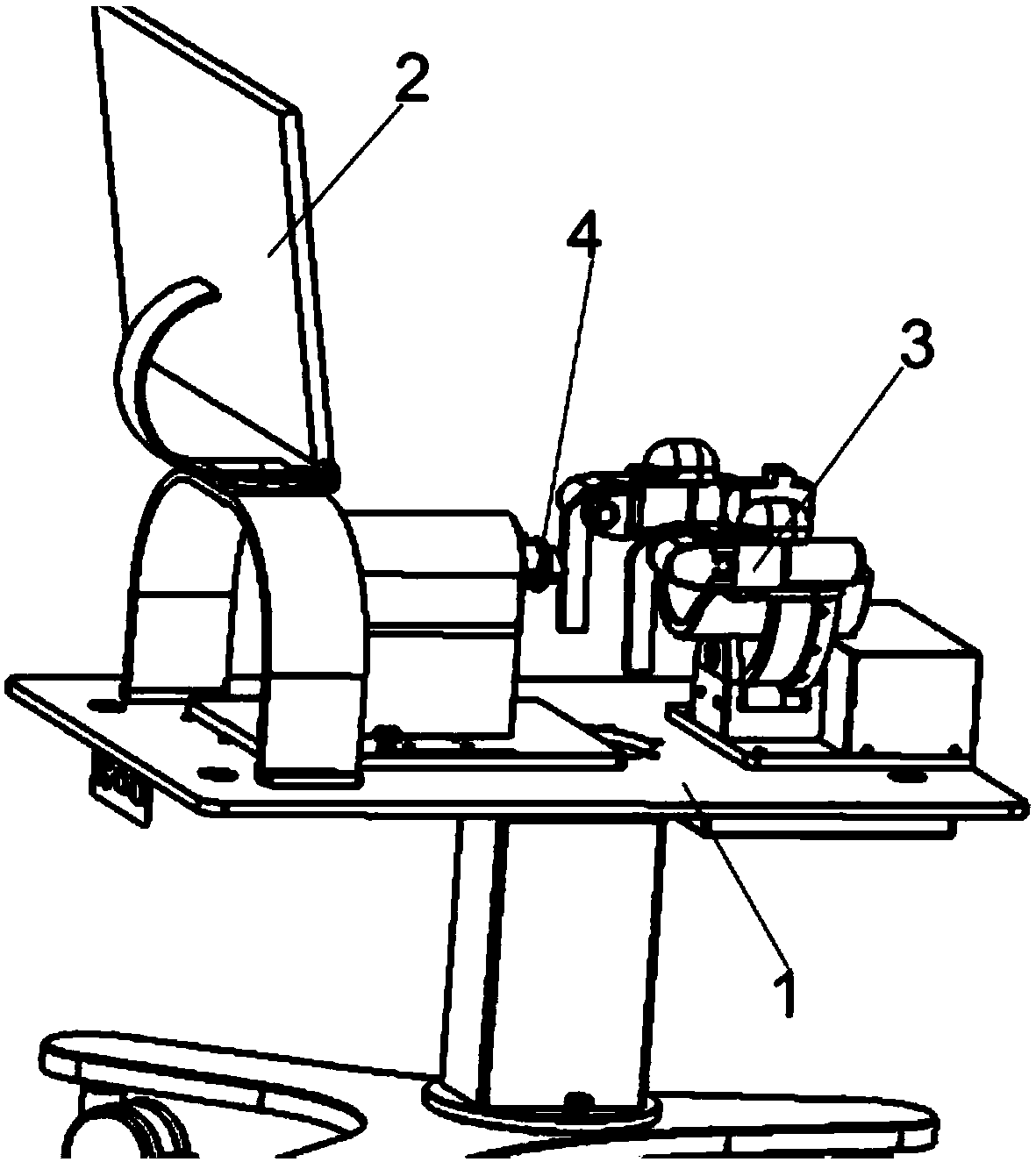
[0028] Such as Figures 1 to 7 As shown, the wrist joint full-function training robot includes a liftable platform 1, a display screen set on the platform 1, a PC host 2, and a gross function movement device 3 and a fine function movement device that can realize left / right wrist joint rehabilitation training 4. The gross function movement device 3 includes a forearm movement device 31, a wrist joint up and down swing device 32, and a wrist joint left and right rotation device 33 connected in sequence, wherein the wrist joint left and right rotation device 33 is detachably connected to the wrist joint up and down swing device 32 through screws . The present invention can realize left / right finger and wrist rehabilitation training through the gross function movement device 3 or the fine function movement device 4, and the rehabilitation training effect is good.
[0029] In this embodiment, the forearm movement device 31 includes a forearm rotating motor 311, a shaft coupling 31...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com