

MEMS-based GNSS/IMU vehicle-mounted real-time integrated navigation method
A combination of navigation and time technology, applied in the field of navigation and positioning, can solve the problems of affecting the filtering results, large size, complex calculation of inertial navigation and Kalman filtering, etc., and achieve the effect of improving positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be described in detail below in conjunction with the accompanying drawings.
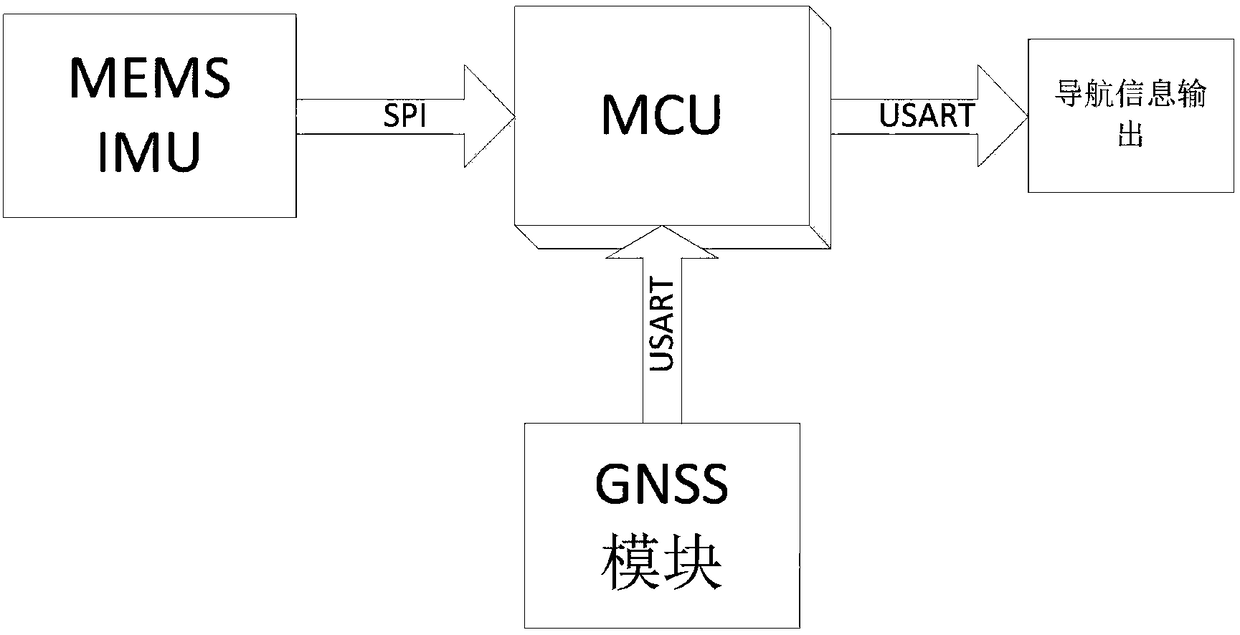
[0029] like figure 1 As shown, the MEMS-based GNSS / IMU vehicle real-time integrated navigation method, its hardware part includes MEMSIMU, which includes a three-axis gyroscope and a three-axis accelerometer; MCU main control unit, responsible for sensor data collection and buffering; GNSS, output global A module for satellite positioning information. The MEMSIMU output data is transmitted by the SPI bus with the highest rate, and the GNSS output data is transmitted by the USART bus.
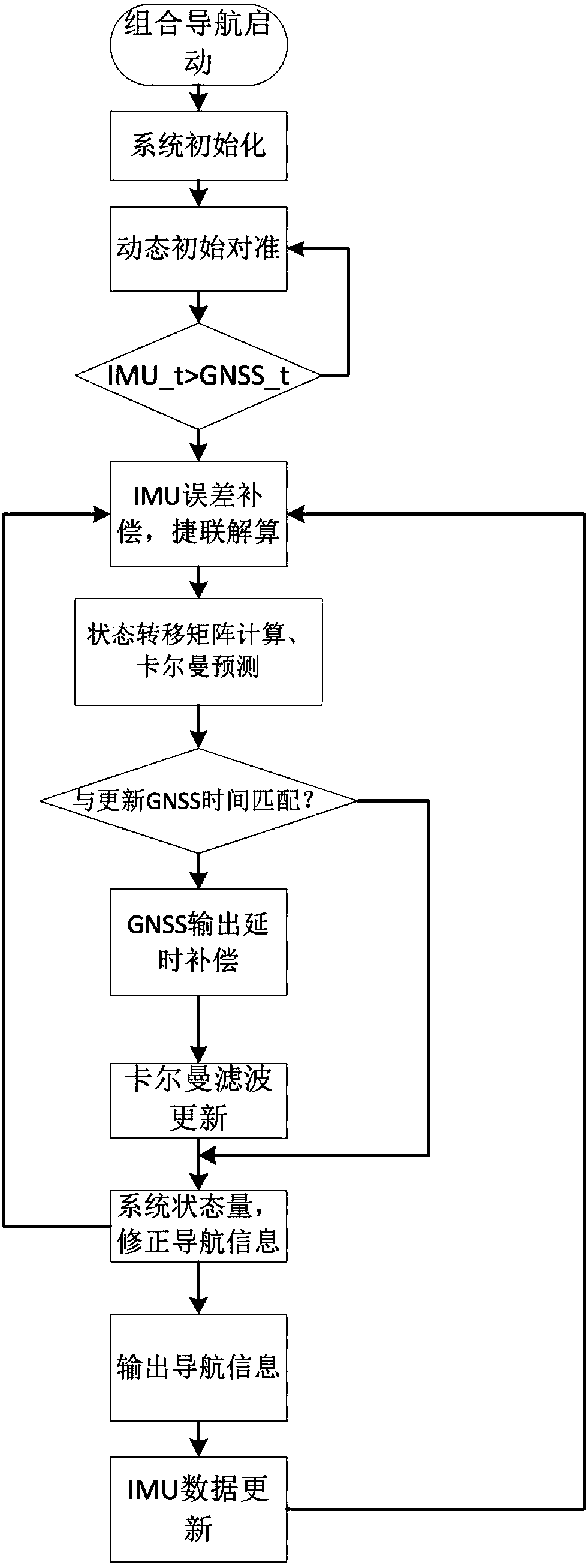
[0030] The method of the present invention comprises the steps of: utilizing the GNSS output information to dynamically align the initial attitude, position and velocity information of the IMU, such as figure 2 In the flow chart shown, the initial alignment calculation process is as follows:
[0031] Update the GNSS data information, use its information to solve the speed and satis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More