Robot gripper
A robot gripper and finger technology, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve problems such as insufficient flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
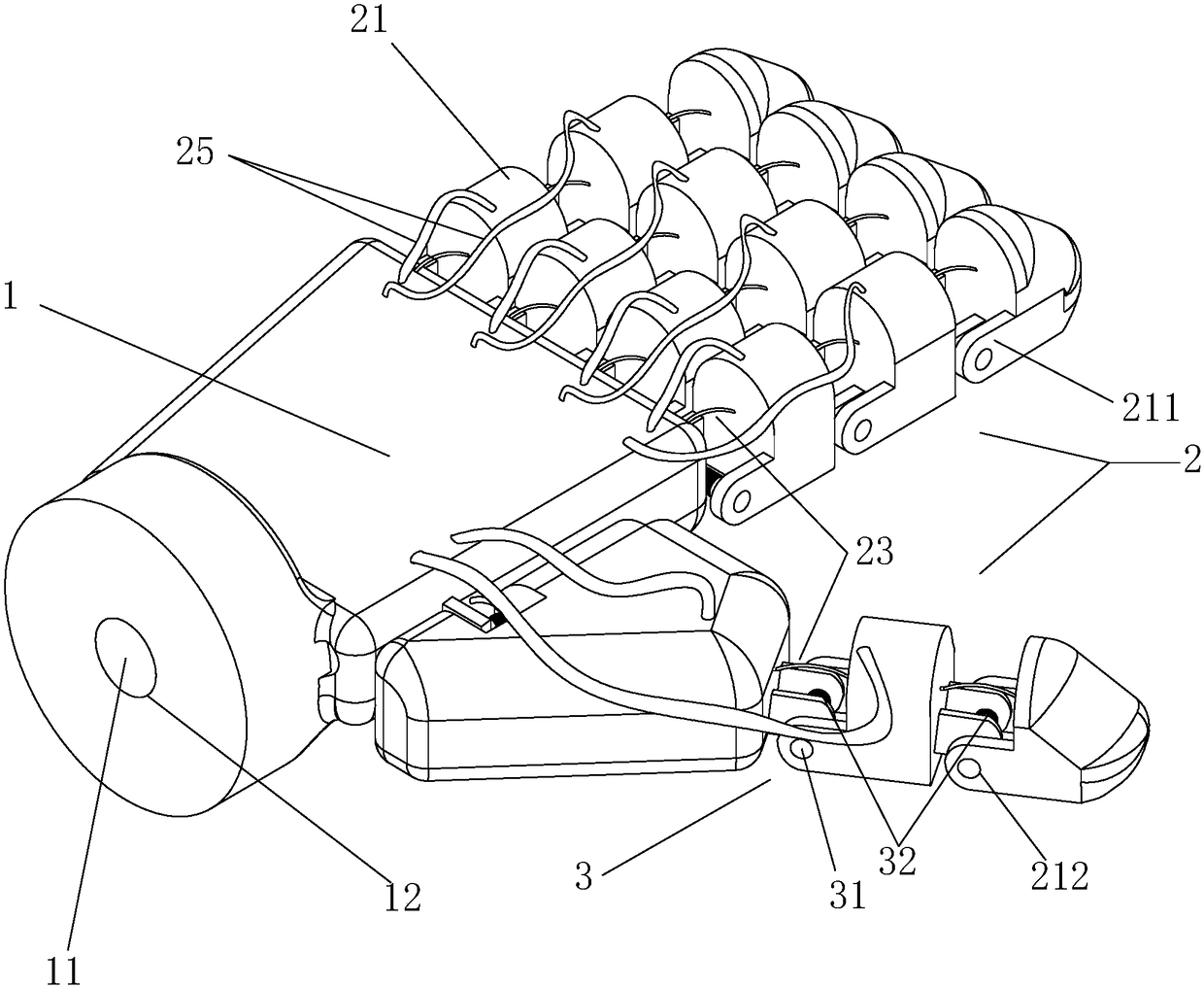
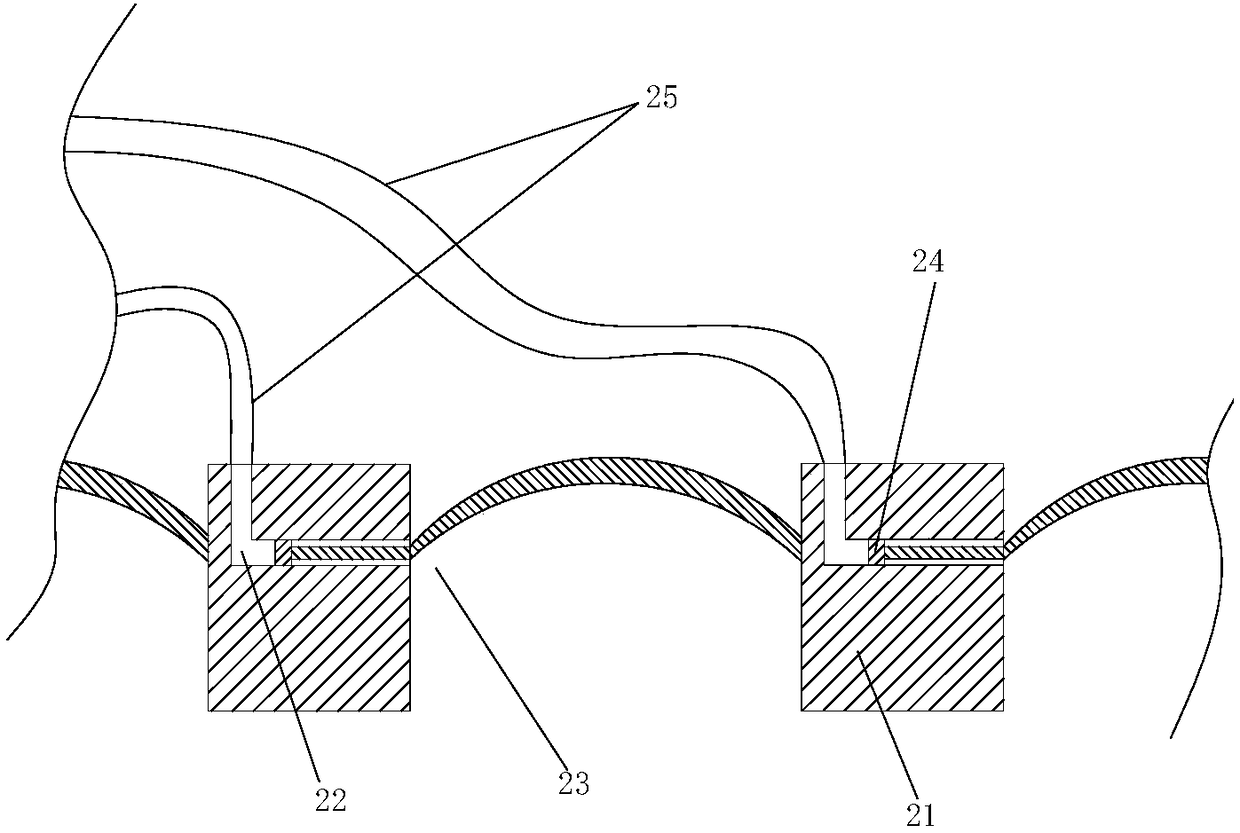
[0016] Such as figure 1 with figure 2 As shown, a robot gripper proposed by the present invention includes a palm 1 with a cavity 11 inside and several fingers 2 that are connected to the palm 1 in rotation. The palm 1 is provided with a medium communicating with the cavity 11. Input hole 12, each finger 2 includes several rotating joints 21 that are connected through rotating device 3 and several driving devices for driving the rotating joints 21 to rotate ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap