

Adaptive head lighter turning control algorithm based on lane line detection
A lane line detection and steering control technology, applied in vehicle position/route/altitude control, two-dimensional position/navigation control, non-electric variable control, etc. problems, to achieve the effect of ensuring driving safety and eliminating visual "blind spots"
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be further described below in conjunction with accompanying drawing.
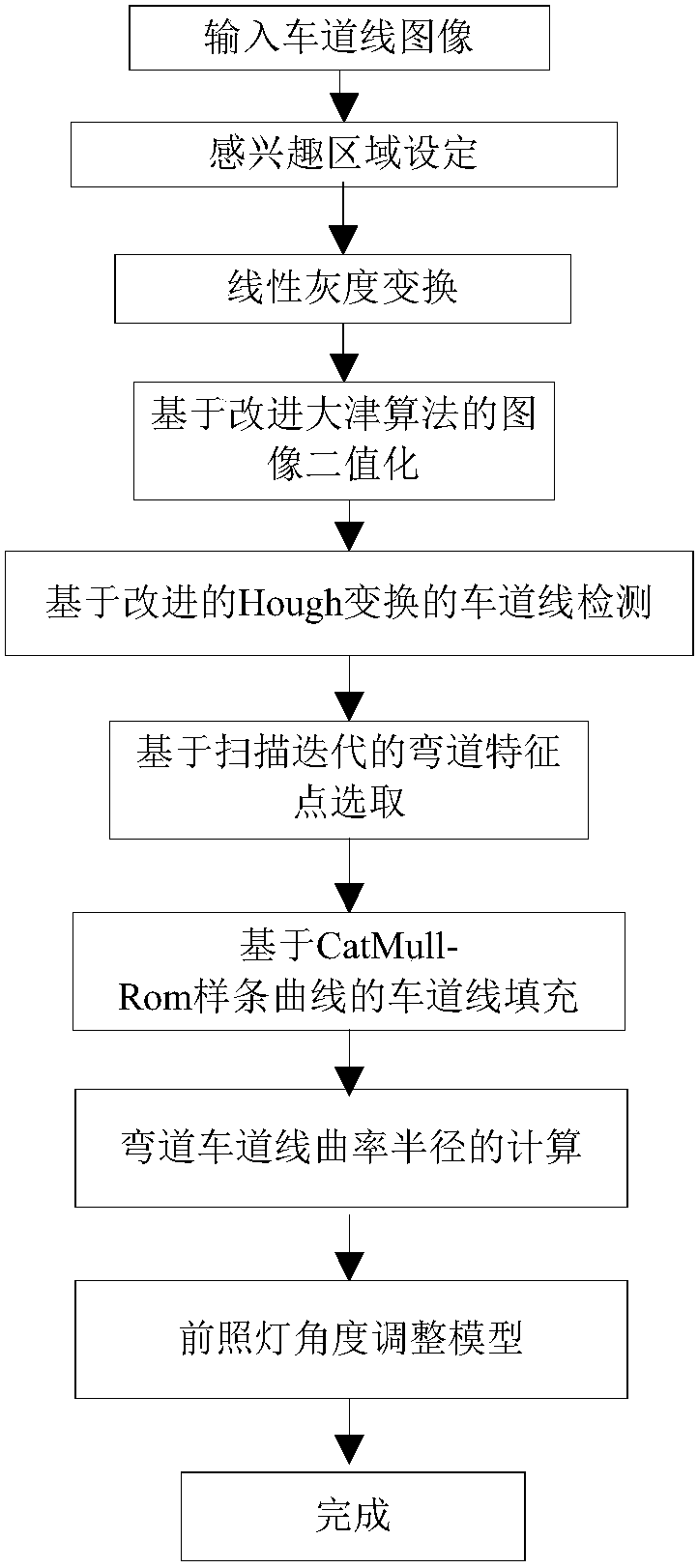
[0018] Such as figure 1 Shown, the present invention comprises the following steps:
[0019] (1) Image preprocessing: through the determination and division of the region of interest, the calculation amount of the subsequent algorithm is reduced; the contrast of each part of the image is enhanced through linear grayscale processing, and the accuracy of the subsequent detection algorithm is improved; the improved Otsu algorithm is used, Complete image binarization.
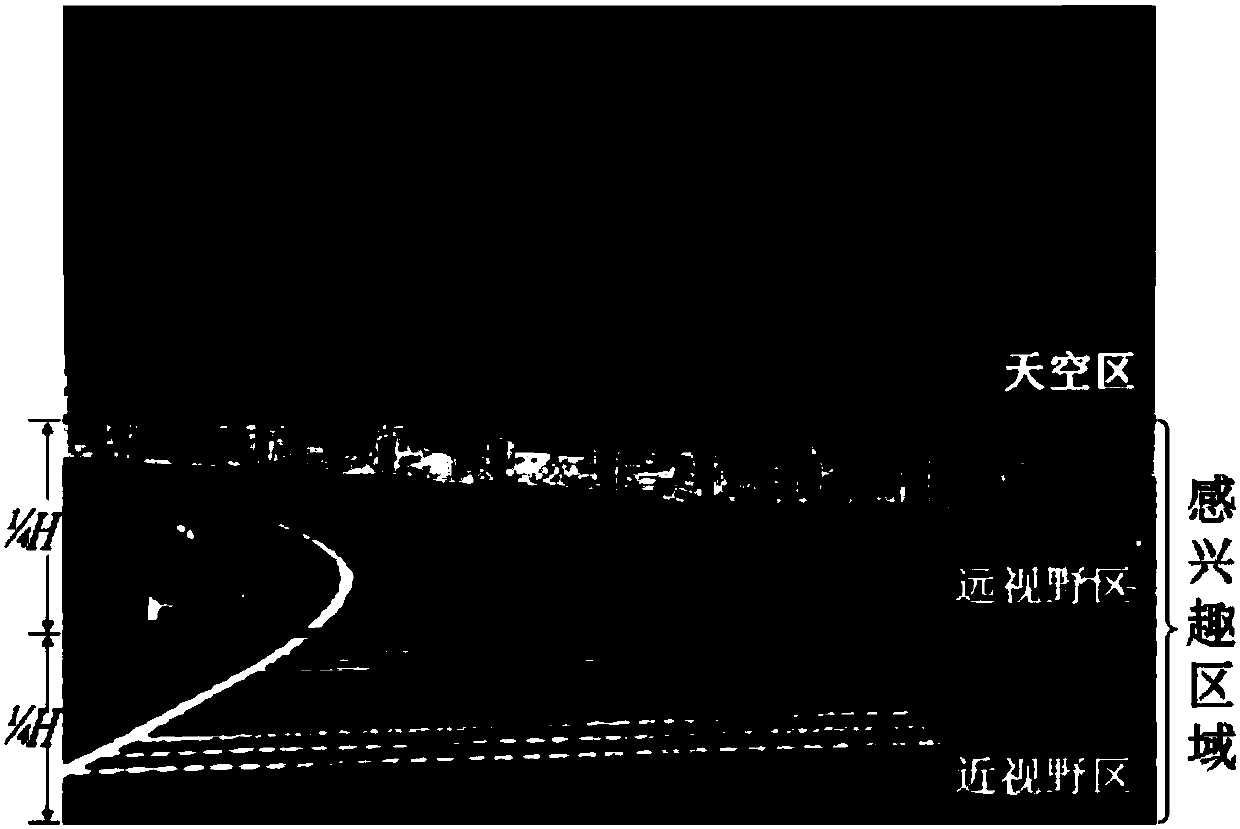
[0020] Determination of the area of interest:
[0021] Such as figure 2 As shown, the acquired image is divided into three horizontal areas from top to bottom: the sky area, the far field of view area and the near field of view area. The area height is one-fourth of the image height. Set the far field of view and the near field of view at the bottom of the image as regions of interest. The following ste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More