

Indoor mobile robot-based object recognition method
A mobile robot and object recognition technology, which is applied in the field of indoor robot object recognition, can solve problems such as misjudgment, affect the accuracy and reliability of object recognition, and the matching algorithm is not very accurate, so as to improve computing efficiency and shorten recognition and judgment. time, the effect of reducing the calculation time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
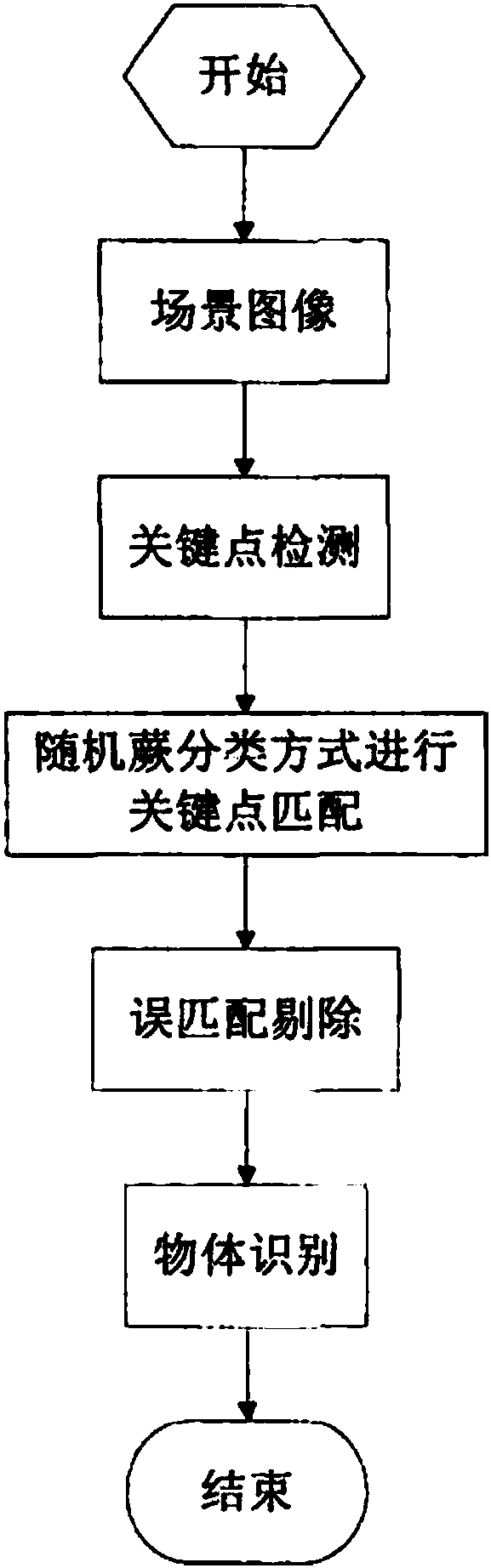
[0028] figure 1 As shown, it is the specific process of the indoor mobile robot object recognition method realized by the present invention. First, it is necessary to detect the local features, that is, the key points, of the target image in the application scene, and the detected local feature neighborhood small blocks (key points feature) through a series of random transformations to generate training samples, and finally generate a random fern classifier; in the online recognition stage, the local features detected in the scene image are classified by the classifier obtained by offline training....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More