

Multi-vehicle collaborative lane changing control method based on vehicle-vehicle communication
A technology of vehicle-to-vehicle communication and control method, which is applied in the field of multi-vehicle cooperative lane change control strategy, and can solve the problems of inability to guarantee vehicle dynamic safety, inability to adapt to complex road conditions, and lack of flexibility.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
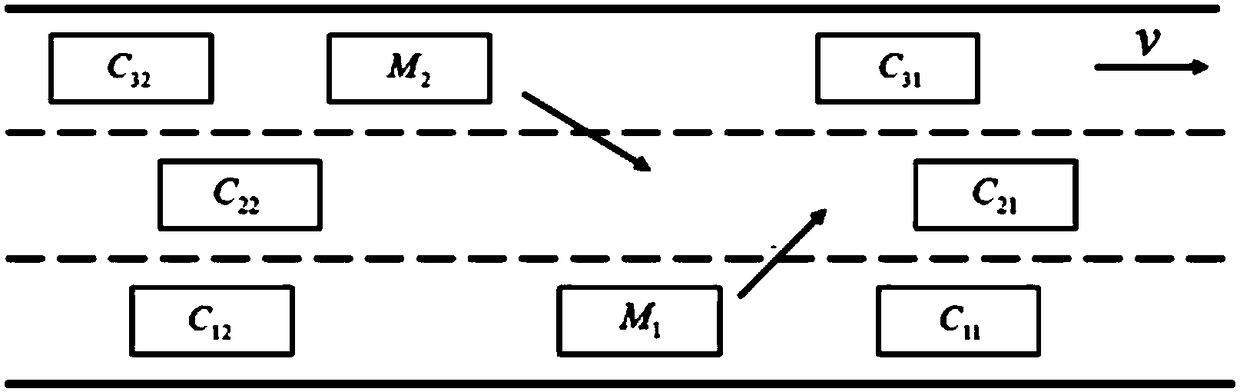
[0092] by figure 1 Take the freeway scene as an example. According to the direction shown in the figure, assume that the vehicle is traveling to the right. According to the driving habits of our country, the rightmost lane of the three lanes in the driving direction (that is, the bottom lane in the figure) represents the low-speed lane. Let The initial speed is v 1 , the second lane is a medium-speed lane, and the initial speed is v 2 , the third lane is a high-speed lane, and the initial speed is v 3 ; Assume that M in the figure 1 , M 2 For two lane-changing vehicles, the initial positions are in the low-speed lane and the high-speed lane, both of which are in advance to change lanes in the middle lane; C ij (i=1, 2, 3; j=1, 2) represent straight-going vehicles on the three lanes respectively, the subscript i represents the lane serial number, and j represents the vehicle serial number, and there are two straight-going vehicles in each lane. M in this scene 1 Change fr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More