Obstacle avoidance pre-judging method based on speed obstacle model/collision probability density model
A speed obstacle and collision probability technology, which is applied in the field of obstacle avoidance prediction based on the speed obstacle model/collision probability density model, can solve problems such as increased computational complexity, and achieve the effect of reducing fatigue and reducing complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
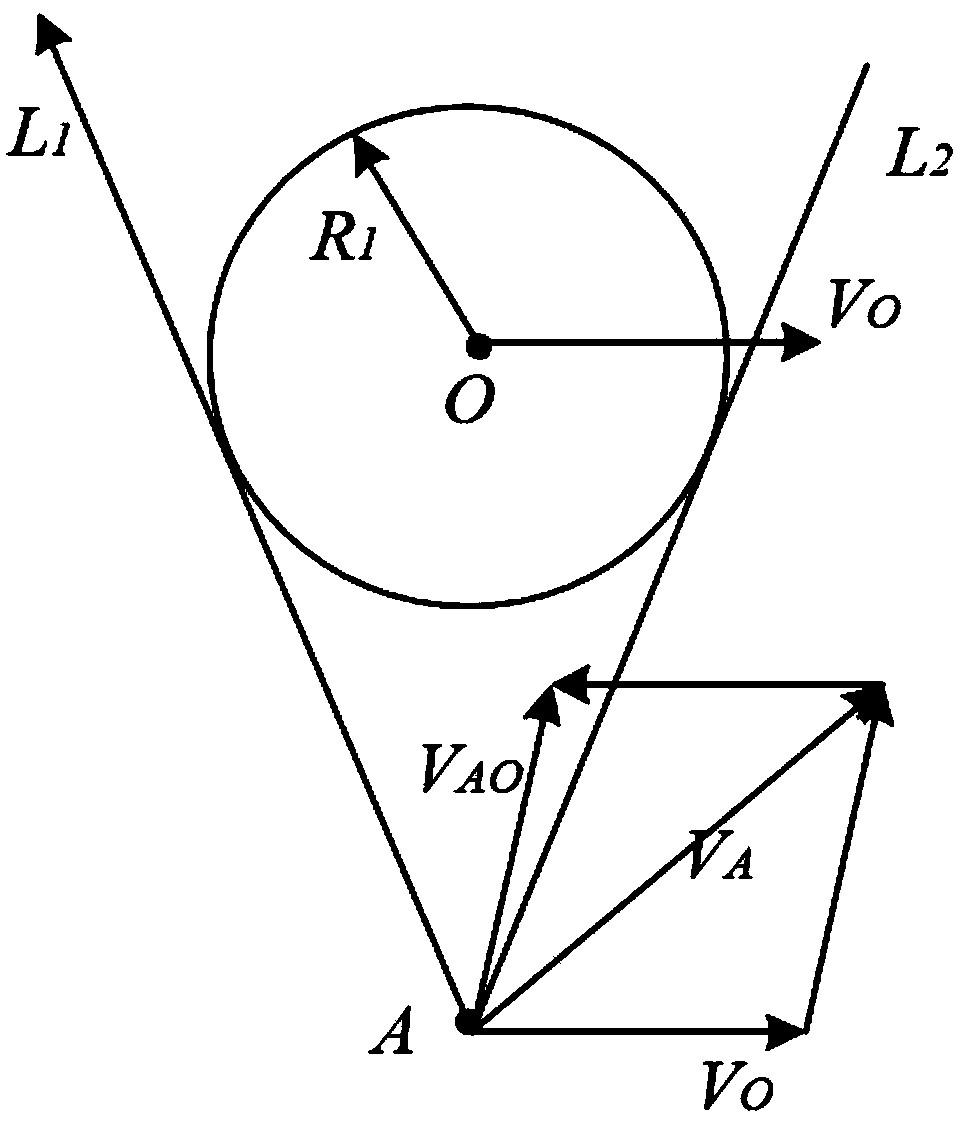
[0063] Such as figure 2 As shown, the speed obstacle model is established by the following method: set the self-vehicle as the mass point A, the obstacle vehicle is puffed into a circle O, and the radius R of the circle O 1 is the sum of the larger size of the length and width of the obstacle vehicle and the larger size of the length and width of the self-vehicle, the distance between the particle A and the circle O is the distance between the self-vehicle and the obstacle vehicle, from Point A draws two rays L 1 and L 2 , respectively circumscribed on both sides of the circle O, L 1 and L 2 The sandwiched conical surface forms a velocity obstacle cone, and the velocity vector of the self-vehicle is v A , the velocity vector of the obstacle vehicle is v O , then the relative velocity vector of the ego vehicle relative to the obstacle vehicle is v AO .
[0064] The on-board controller judges the possibility of a collision between the own vehicle and the obstacle vehicle...
Embodiment 2
[0066] Such as Figure 3-5 As shown, the collision probability density model is established by the following method:
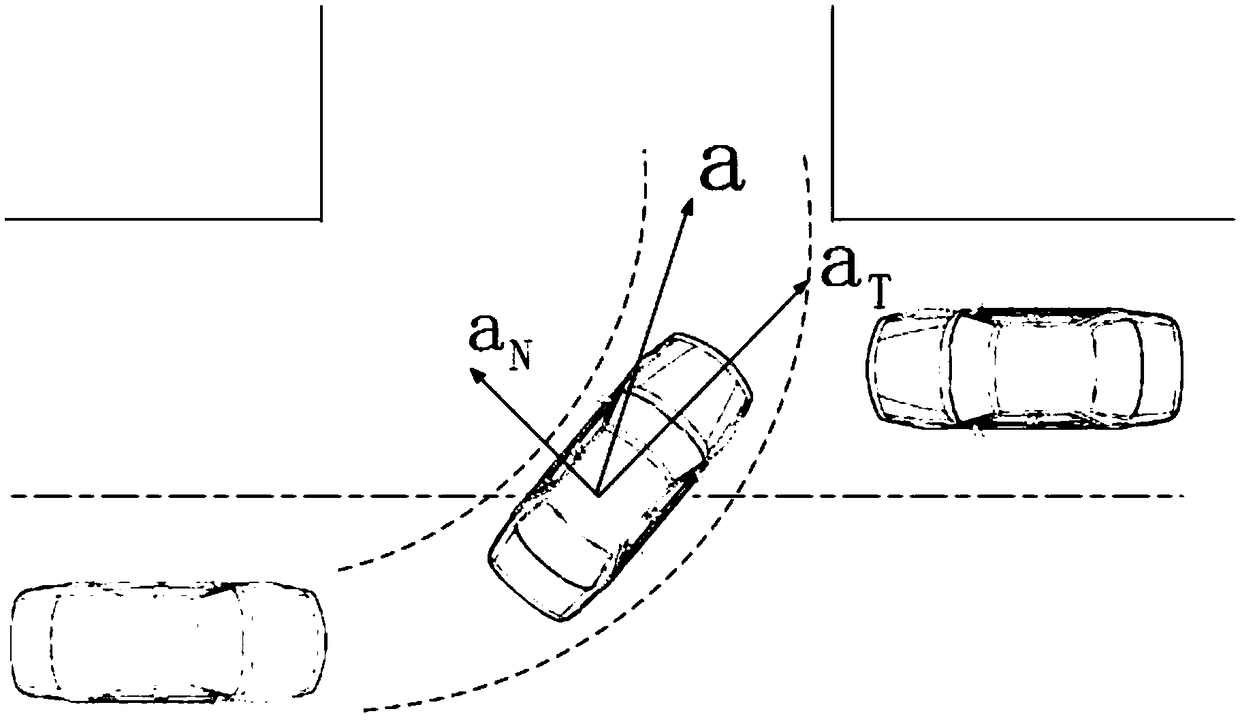
[0067] Ⅰ. Calculation of self-vehicle acceleration a: image 3 As shown, the current self-vehicle is traveling at the acceleration a, and the centripetal acceleration is a N , the tangential acceleration is a T ;
[0068] The centripetal acceleration a of the ego vehicle N The calculation formula is as follows:
[0069]
[0070] Among them: v is the current driving speed of the own vehicle, ρ(s) is the arc radius of the path trajectory of the own vehicle, both of which are obtained by the on-board controller through the on-board perception module, when ρ(s) is 0, that is, the own vehicle is currently driving in a straight line when, record as a N = 0;
[0071] The tangential acceleration of the ego vehicle a T The formula for the relationship with the rate of change of speed v is as follows:
[0072]
[0073] where: k 1 and k 2 are given const...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap