

Monocular SLAM initialization method
An initialization method and monocular technology, applied in the field of monocular SLAM initialization, can solve the problems of insufficient precision, time-consuming, and inability to calculate the real scale of the scene, etc., to achieve the goals of reducing calculation costs, high precision, and fast initialization speed Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The technical solution of the present invention will be further described in detail below with reference to the accompanying drawings and embodiments. The following embodiments do not constitute a limitation to the present invention.
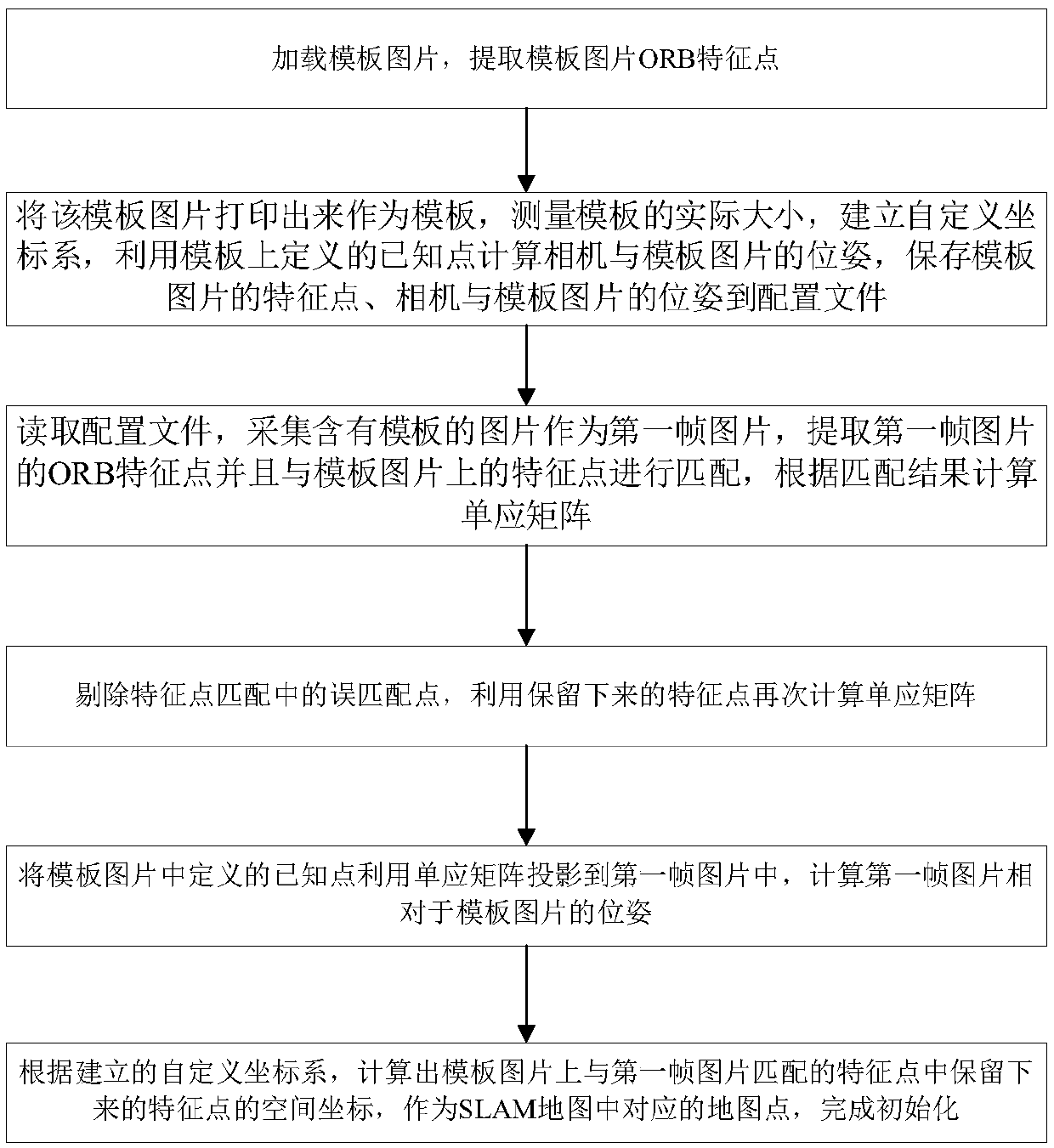
[0032] figure 1 An embodiment of a monocular SLAM initialization method is shown, including:
[0033] Step S1: Load the template image, and extract the ORB feature points of the template image.
[0034] In this embodiment, a template picture is prepared in advance, the template picture is a known picture with texture, and the template picture is printed out as a template for backup. First, extract the feature points of the template image ORB. ORB is a faster calculation method for feature points. It uses FAST corner detection and Brief descriptors, and uses image pyramids to maintain scale invariance, and uses gray-scale centroid method. Maintaining rotation invariance is a robust feature that can be calculated in real time.
[0035] When extra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More