

VIO rapid united initialization method based on monocular camera
An initialization method, camera technology, applied in navigation through speed/acceleration measurement, image data processing, instruments, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
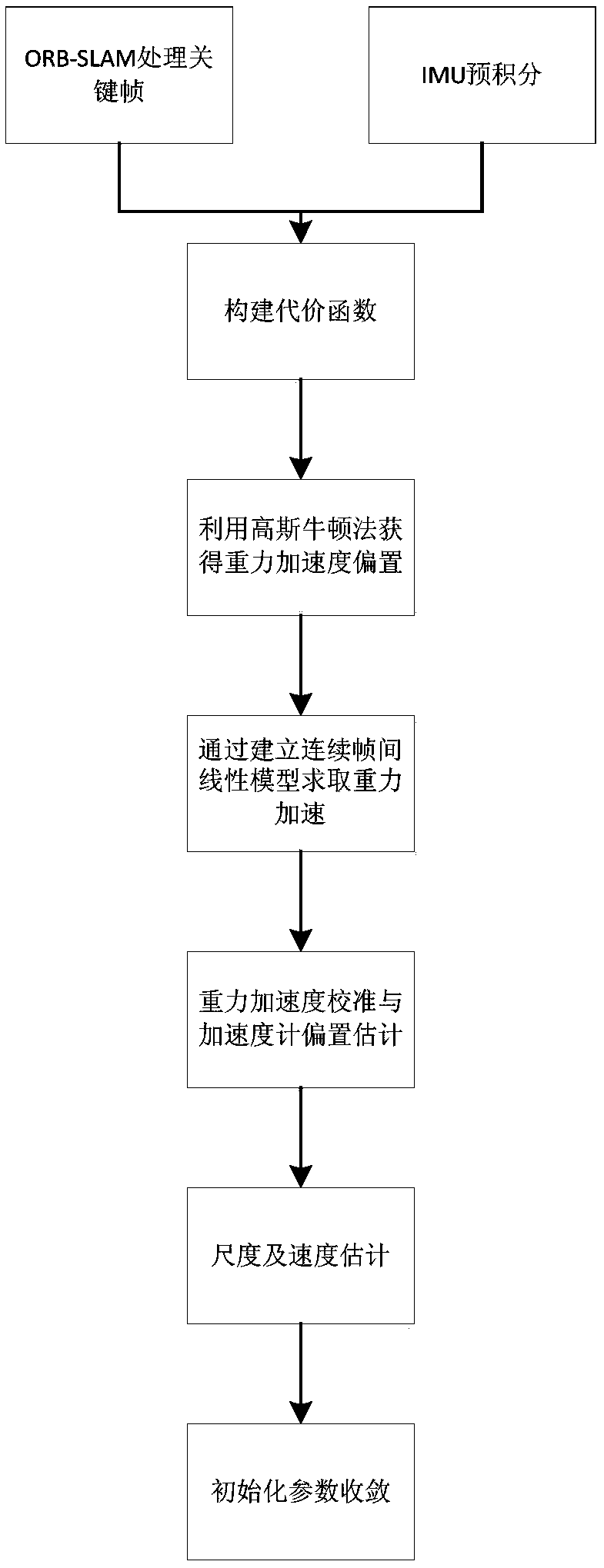
[0062] Such as figure 1 As shown, the VIO fast joint initialization method based on the monocular camera includes the following steps:
[0063] (1) Process a few seconds of video with ORB-SLAM to obtain the initial pose and a few keyframes;
[0064] (2) construct cost function calculation gyroscope deviation by the key frame in the step (1) and IMU pre-integration;
[0065] (3) Obtain the gravity accelerometer bias, gravity acceleration, gravity acceleration calibration and gravity accelerometer bias by solving the linear model between consecutive frames;
[0066] (4) Calculate the scale and velocity information through the gravitational acceleration calibration and parameter separation in step (3).
[0067] Step 1. Gravity accelerometer bias estimation
[0068] The motion between two consecutive keyframes can be described by the pre-integrated ΔR, Δv, Δp measured between the two frames. From the pre-integration equation:
[0069]
[0070]
[0071]
[0072] i and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More