

Automatic driving vehicle transverse coordination control method based on extendable priority-degree evaluating
A technology of automatic driving and coordinated control, applied in the field of automatic driving vehicle control system, can solve problems such as poor overall control effect, and achieve the effect of improving jitter, high comfort, and stable control process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with the description of the drawings and specific embodiments, but the protection scope of the present invention is not limited thereto.
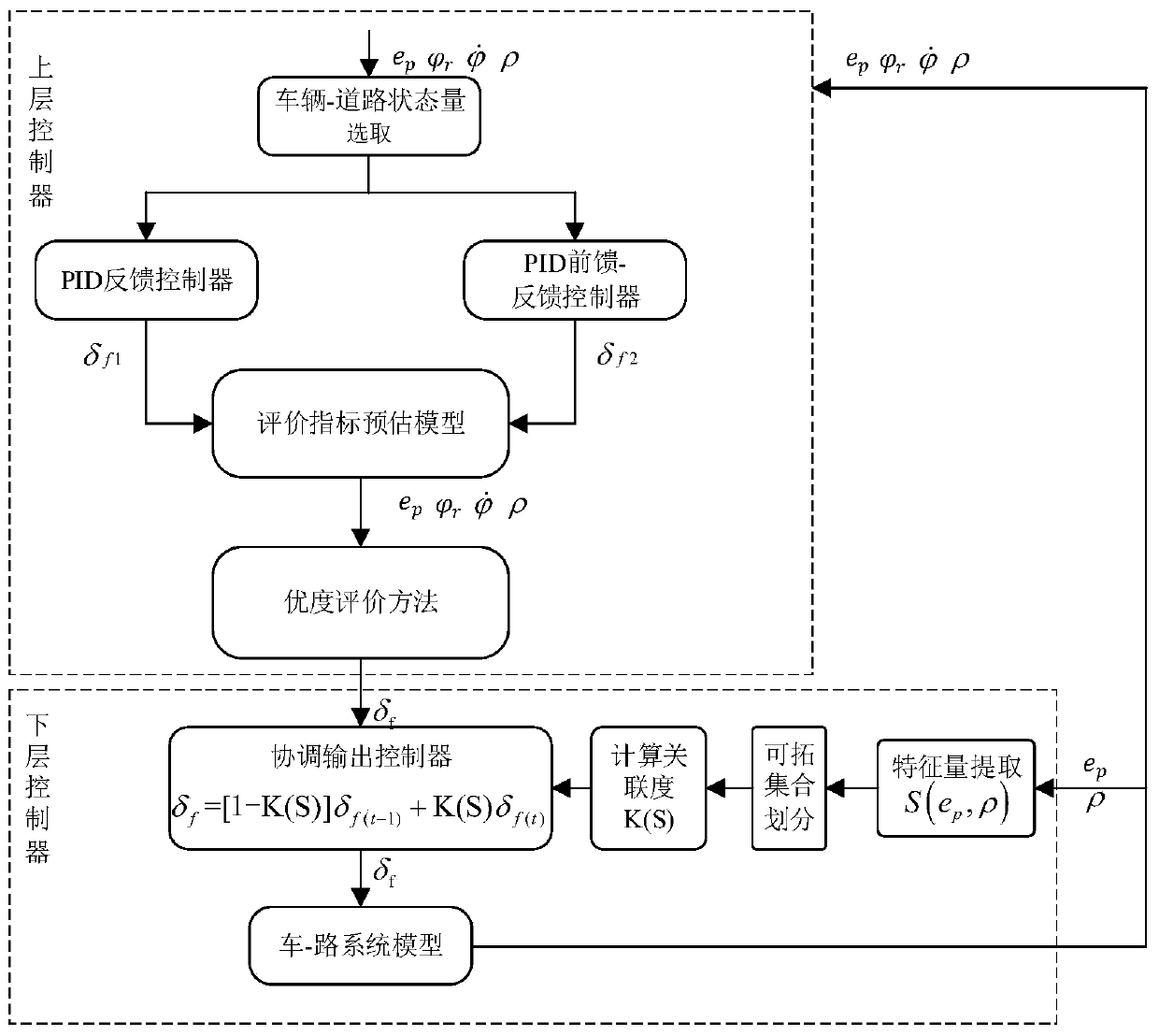
[0036] figure 1 It is a flow chart of a horizontal coordination control method for an automatic driving vehicle based on the evaluation of extension goodness, and the method of the present invention includes designing an upper-level controller and a lower-level controller, specifically as follows:
[0037] Upper controller: Obtain the vehicle-road state quantity collected from the vehicle sensor, the lateral position deviation e between the vehicle and the road centerline p , the heading deviation between the vehicle and the road centerline vehicle yaw rate and the road centerline curvature ρ. The vehicle-road state quantity is input into the PID feedback controller and the PID feedforward-feedback controller respectively as the input value, and the correspondi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More