Spatial parallelly driven wrist rehabilitation treatment robot
A rehabilitation therapy and robotics technology, applied in physical therapy, passive exercise equipment, etc., can solve the problems of neglecting the wrist joint and elbow joint rehabilitation training, focusing only on wrist joint rehabilitation training, etc., to achieve the effect of improving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
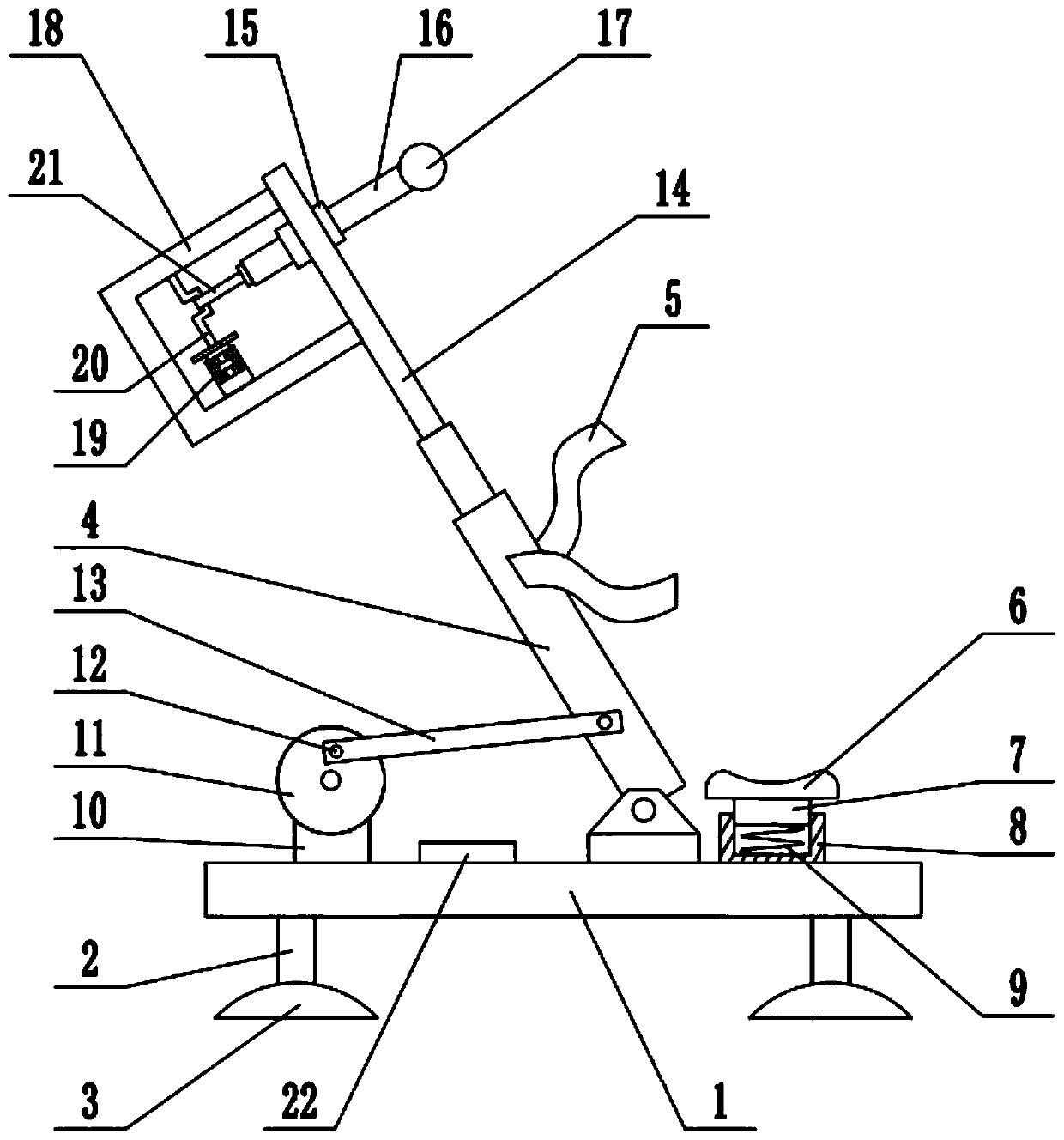
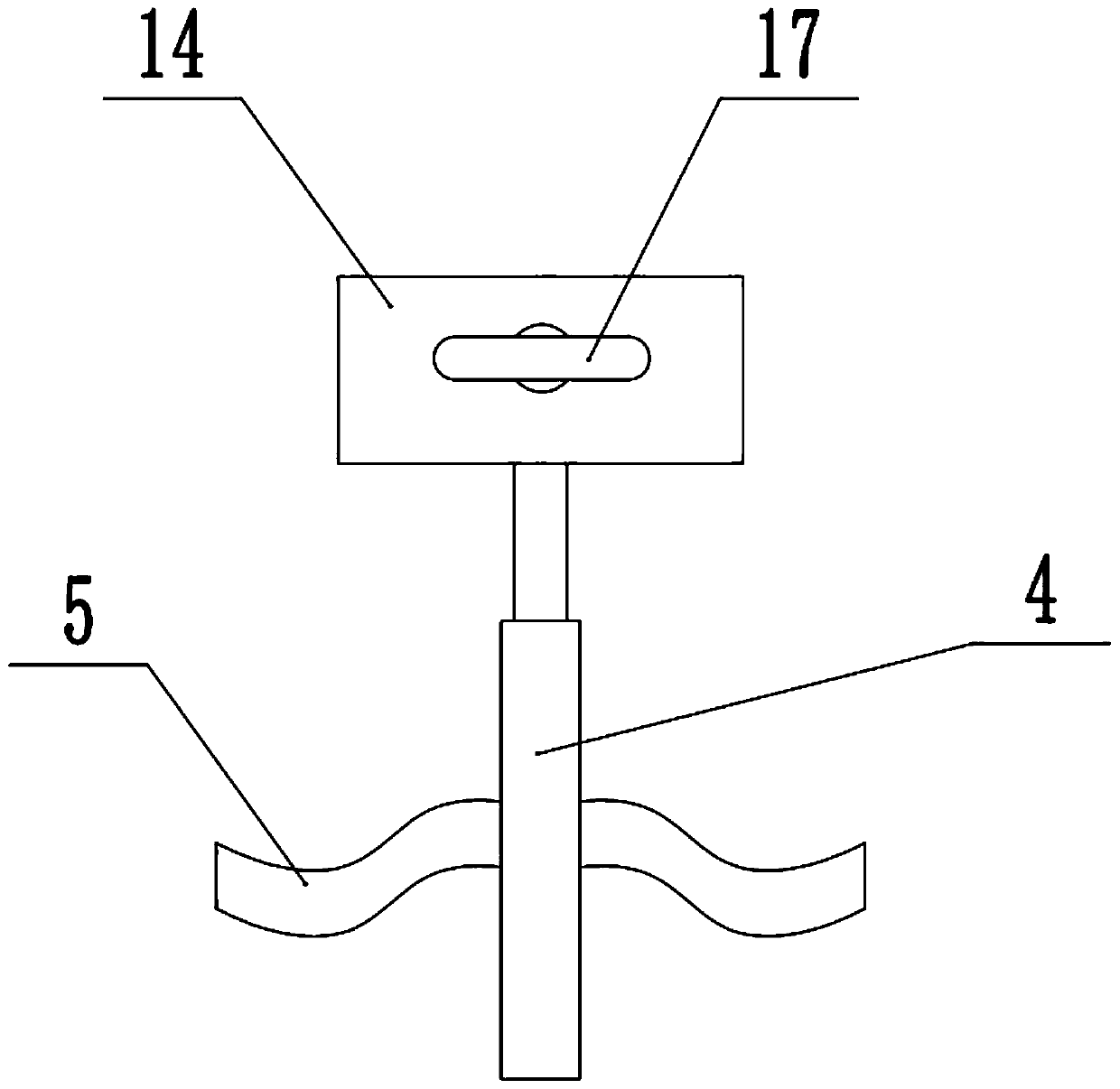
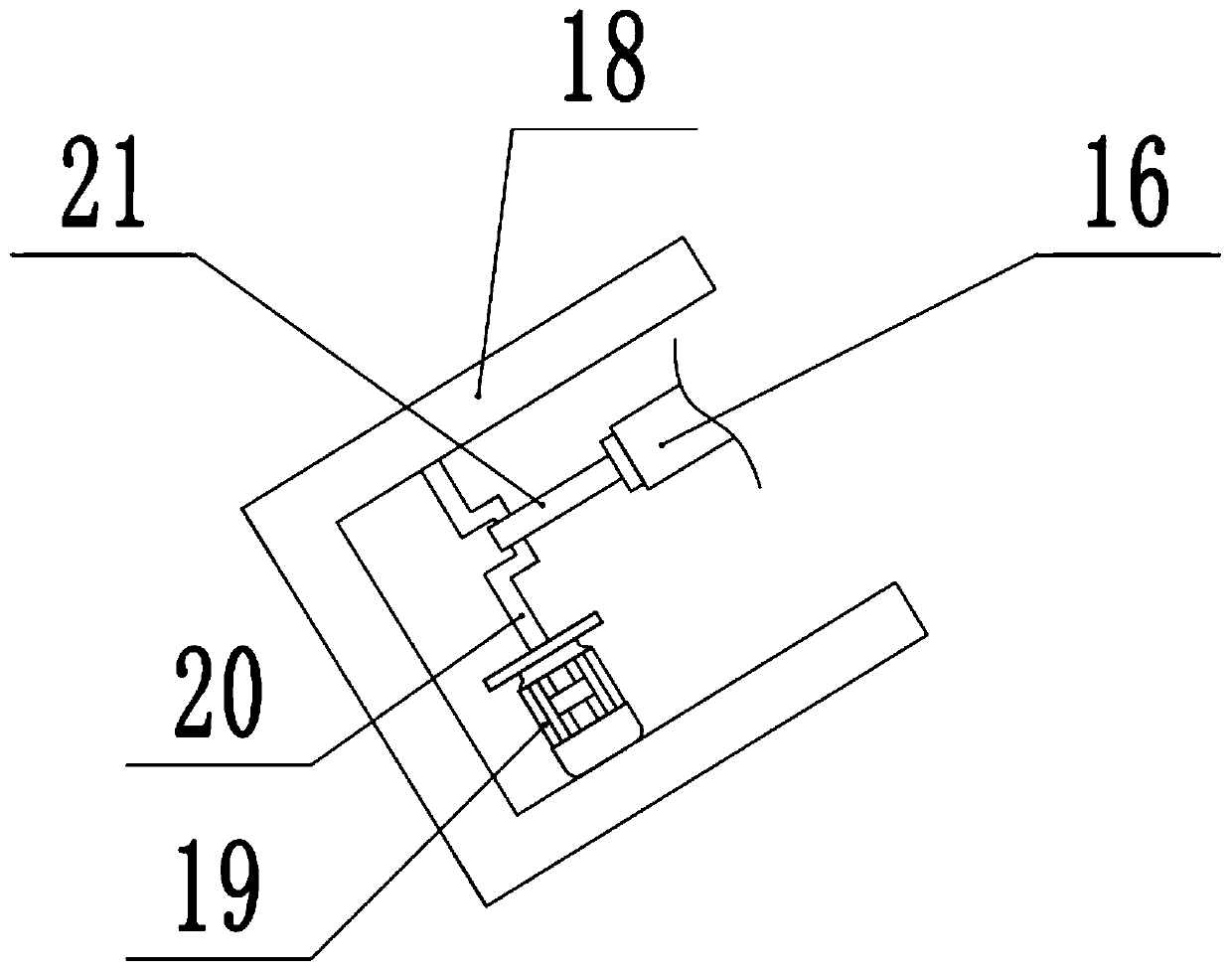
[0020] see Figure 1-3 , in an embodiment of the present invention, a space-parallel driving wrist rehabilitation robot includes a frame 1, a telescopic mechanism 4, a fixed plate 14 and a handle 17, and the upper surface of the frame 1 is hinged with a telescopic mechanism 4, and the telescopic mechanism 4 is an electric motor. The hydraulic telescopic cylinder, the side wall of the telescopic mechanism 4 is equipped with a restraint belt 5, the right side of the telescopic mechanism 4 is provided with a sleeve 8, the sleeve 8 is fixedly connected to the frame 1, and the inside of the sleeve 8 is provided with a movable column 7, The movable column 7 is slidably connected with the inner wall of the sleeve 8, the inside of the sleeve 8 is equipped with a spring 9, the top of the movable column 7 is fixedly connected with a backing plate 6, and the movable column 7 can slide up and down, so that the backing plate 6 can move up and down, The upper surface of the backing plate 6 ...
Embodiment 2
[0025] On the basis of Embodiment 1, the bottom of the frame 1 is fixedly connected with a leg 2, and a suction cup 3 is installed at the lower end of the leg 2, and the device can be firmly adsorbed on the desktop by using the suction cup 3, thereby improving stability.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com