

Vehicle route planning and debugging method and device, equipment and computer readable medium
A technology of route planning and debugging method, which is applied in the direction of calculation, two-dimensional position/channel control, data processing application, etc., to achieve the effect of convenient debugging and accelerated iterative development speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] In the following, only some exemplary embodiments are briefly described. As those skilled in the art would realize, the described embodiments may be modified in various different ways, all without departing from the spirit or scope of the present invention. Accordingly, the drawings and descriptions are to be regarded as illustrative in nature and not restrictive. Embodiments of the present invention mainly provide a method and device for planning and debugging vehicle routes, and the technical solutions are described in the following embodiments respectively.
[0053] The present invention provides a vehicle route planning and debugging method and device. The specific processing flow and principles of the vehicle route planning and debugging method and device according to the embodiments of the present invention will be introduced in detail below.
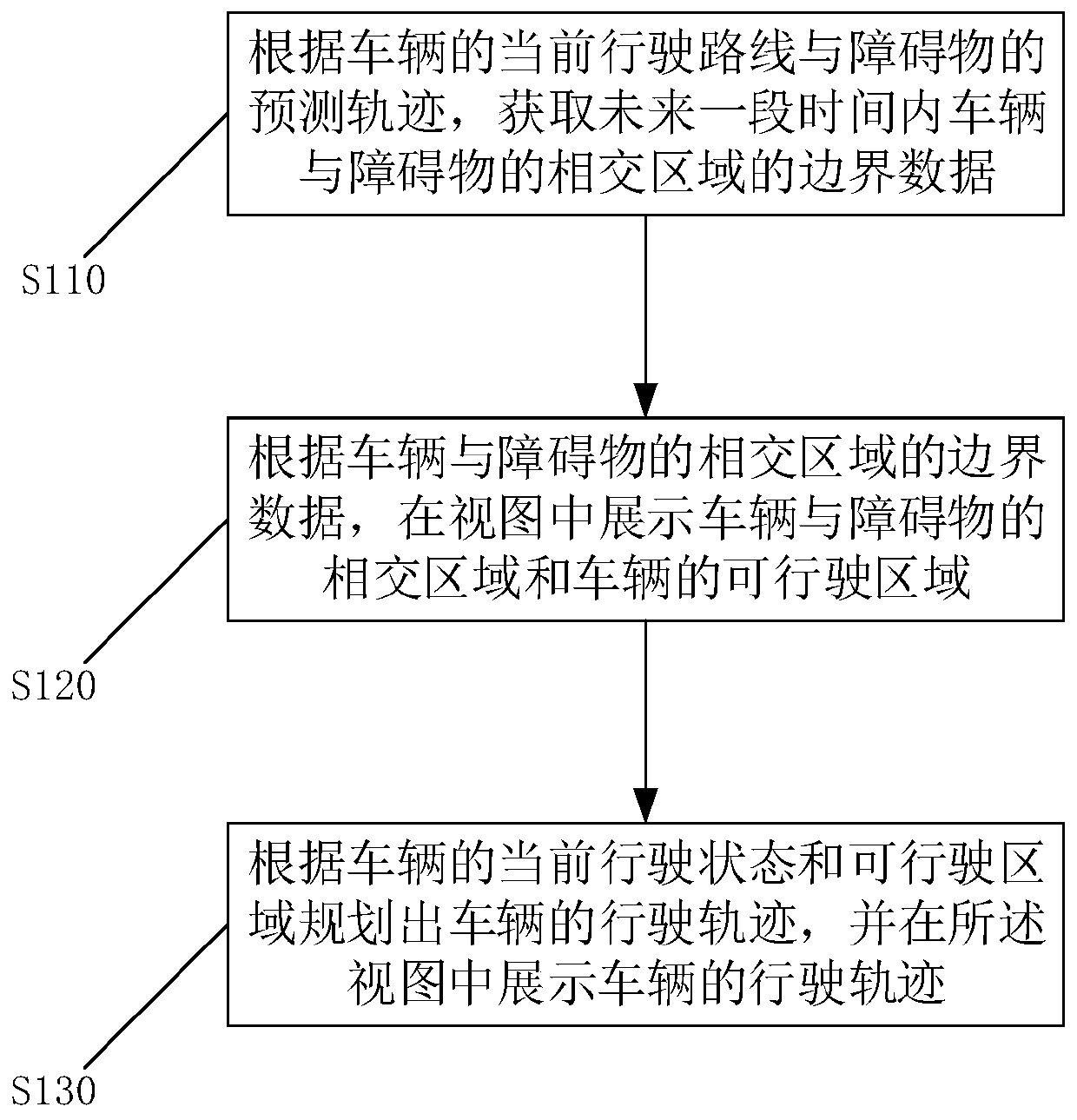
[0054] Such as figure 1 As shown, it is a flow chart of the vehicle route planning and debugging method according to th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More