

Pneumatic finger clamping and finger root rotation electric finger root rotatable flexible manipulator
A pneumatic finger and manipulator technology, applied in the field of agile manipulators, can solve the problems of the impact of grasped complex objects, inability to adapt to the shape, size inconsistency, etc., to achieve accurate and reliable grasping, accurate control, and fast response.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The specific implementation manner of the present invention will be described below in conjunction with the accompanying drawings.
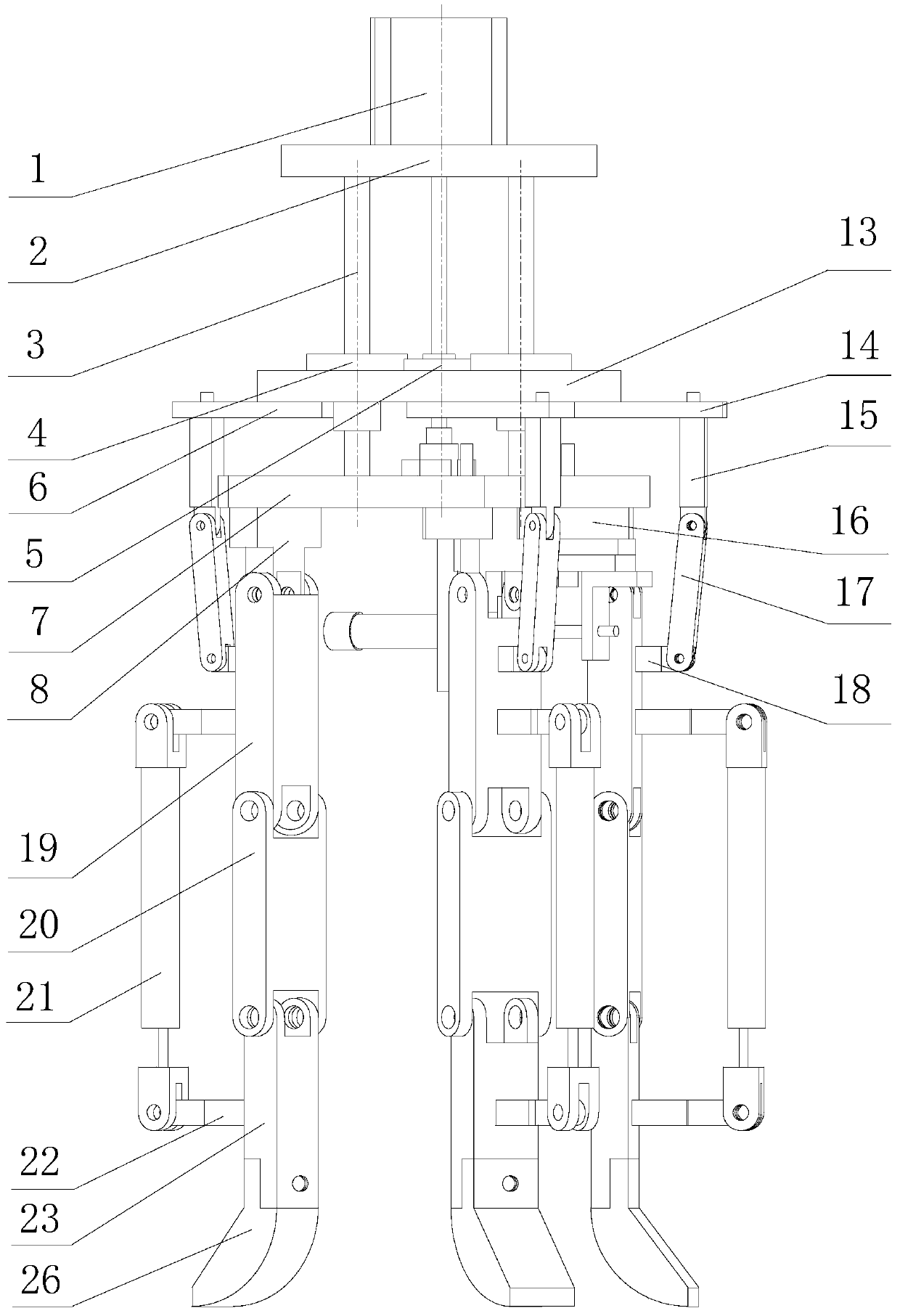
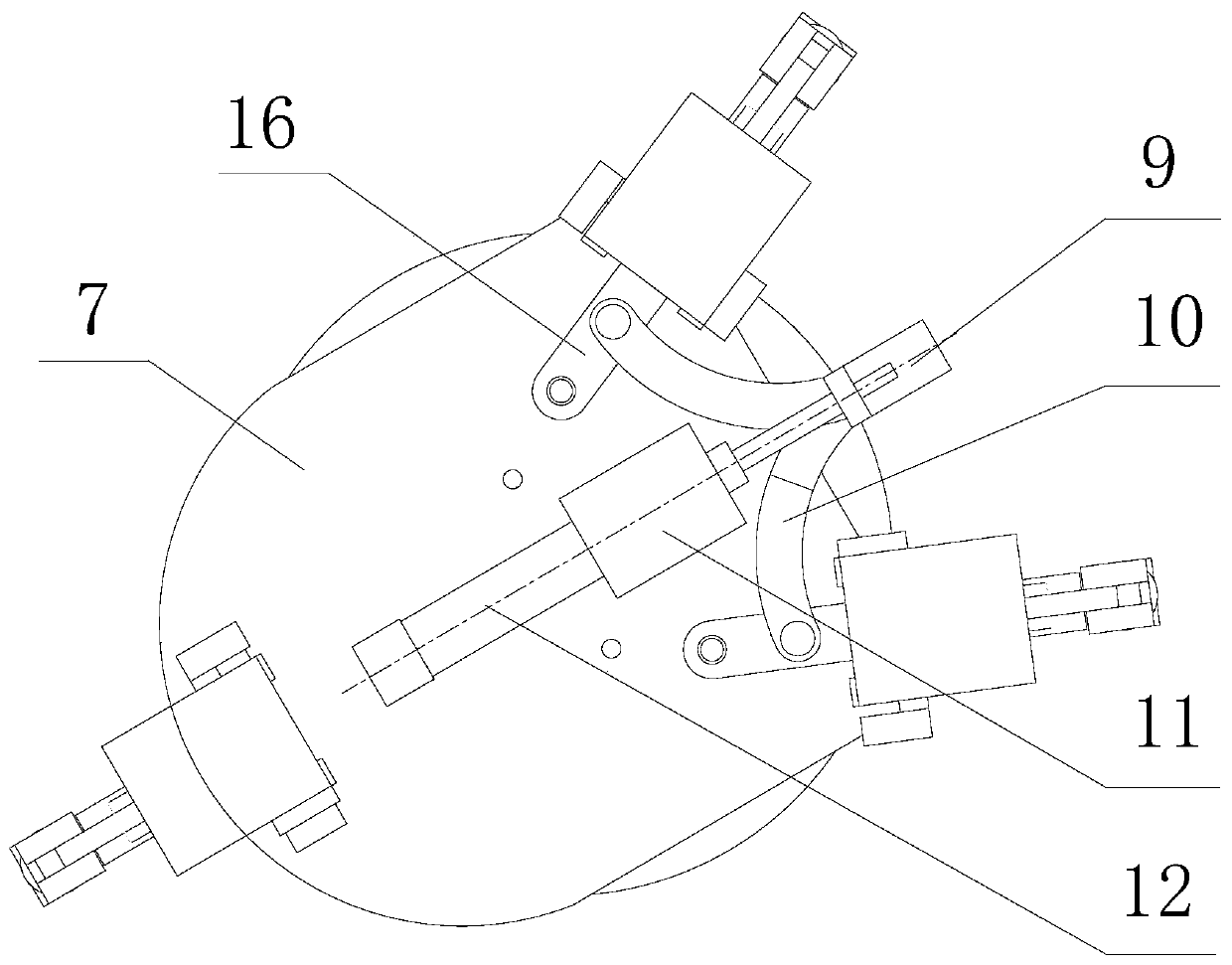
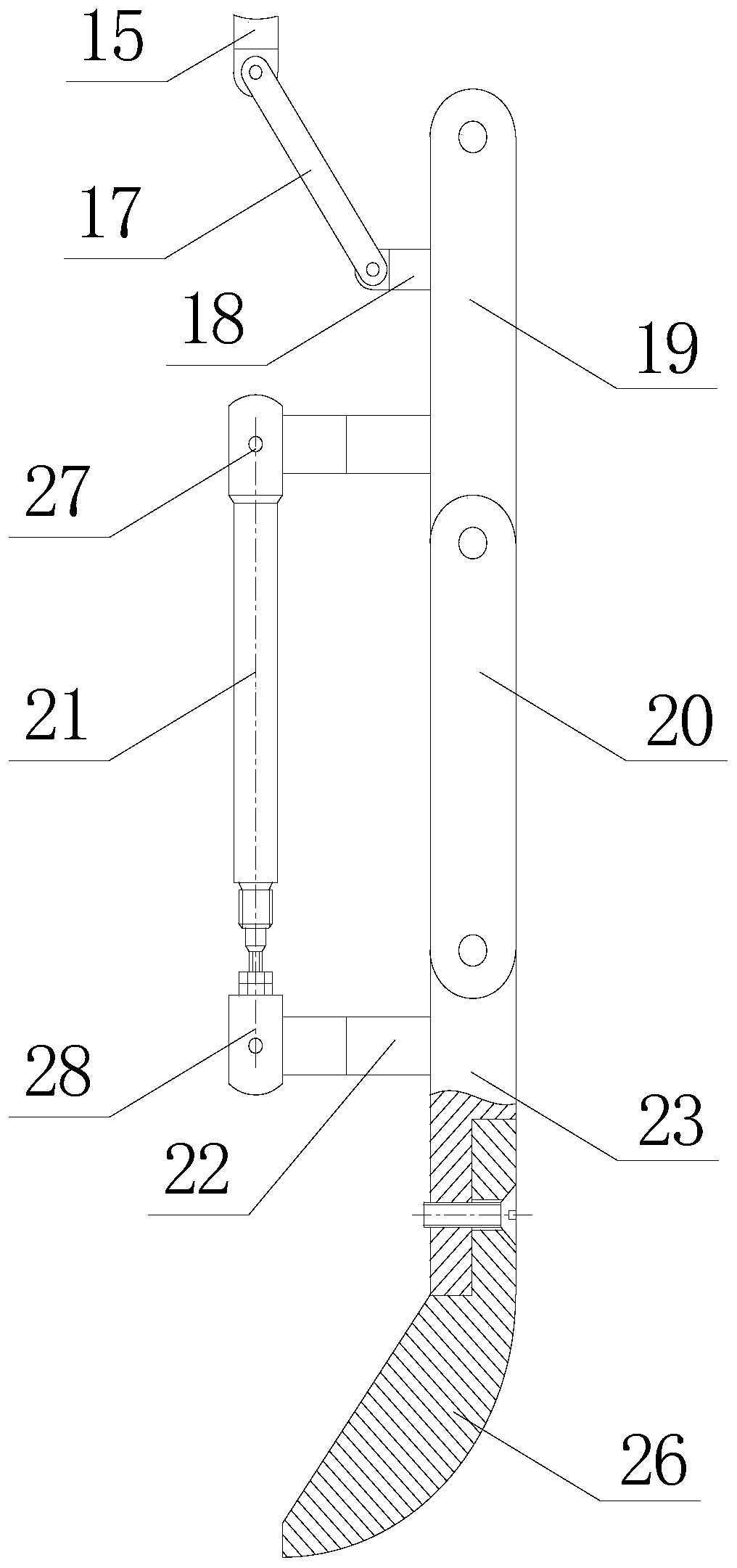
[0045] like figure 1 , figure 2 and Figure 5-Figure 7 As shown, the agile manipulator of the pneumatic finger clamping and root indexing and electric finger root rotation of this embodiment includes a palm part and a finger part connected with the palm part;
[0046] The structure of the palm part is: including the fixed plate 2, the upper surface of the fixed plate 2 is equipped with a screw shaft motor 1, the lower surface of the fixed plate 2 is connected with the bottom plate 7 through two guide rods 3, and the bottom plate 7 is arranged in parallel with the fixed plate 2 , the part of the guide rod 3 between the bottom plate 7 and the fixed plate 2 is sleeved in the moving plate 13 through the linear bearing 4, and the screw shaft of the screw shaft motor 1 is screwed with a screw nut fixed in the moving plate 13 5. The screw shaft...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More