

Manipulator with dual-drive special-shaped super-soft elastic skeleton
A technology of elastic skeleton and manipulator, applied in the direction of manipulators, manufacturing tools, chucks, etc., can solve problems such as inability to adapt to shape, inconsistent size, impact of grasped complex objects, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The specific implementation manner of the present invention will be described below in conjunction with the accompanying drawings.
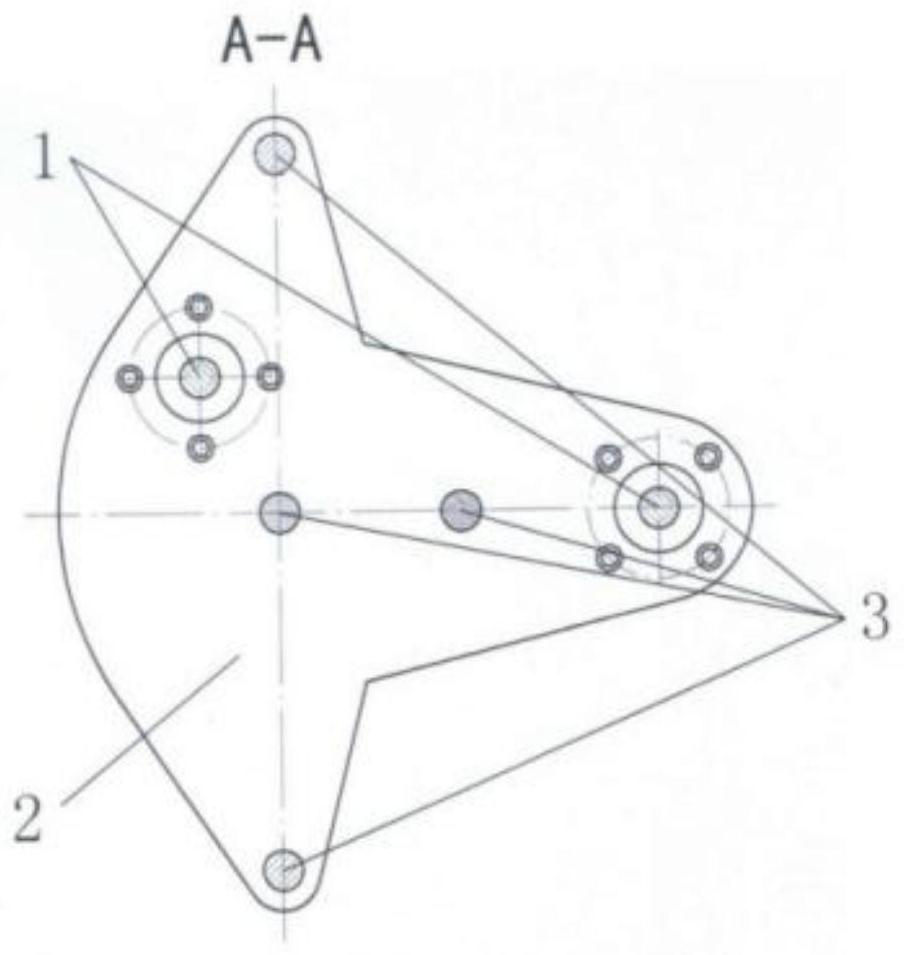
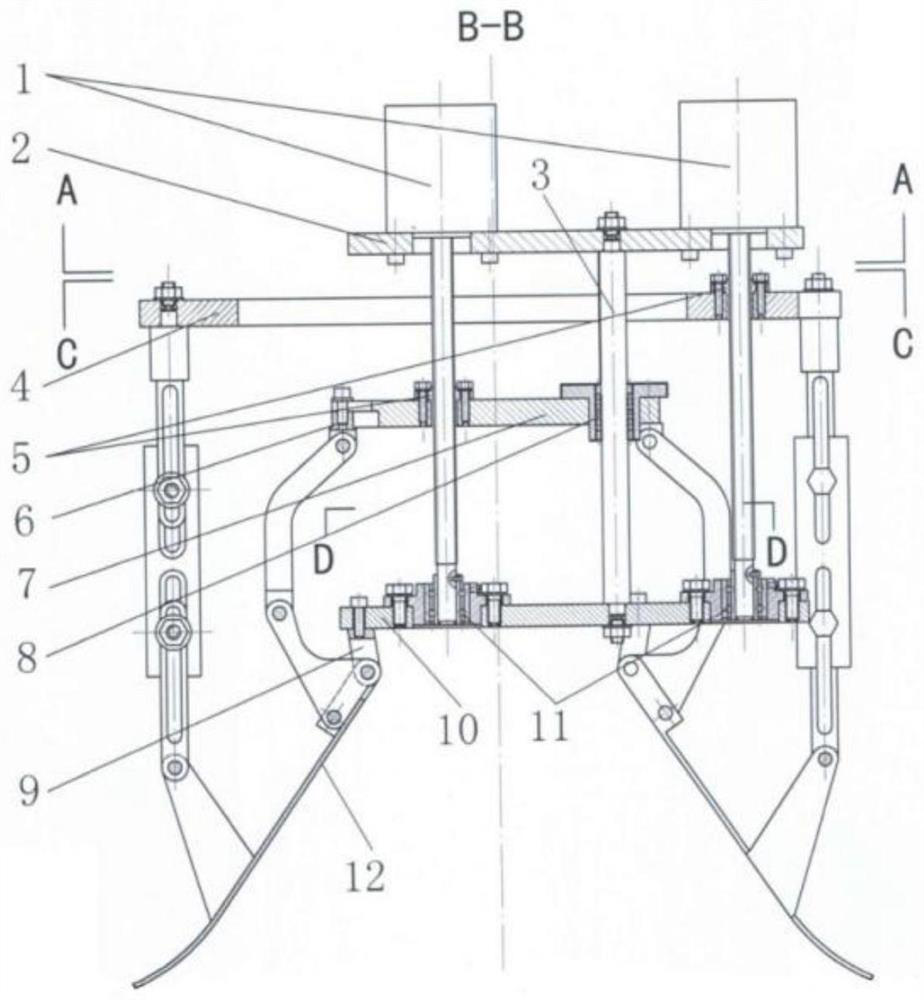
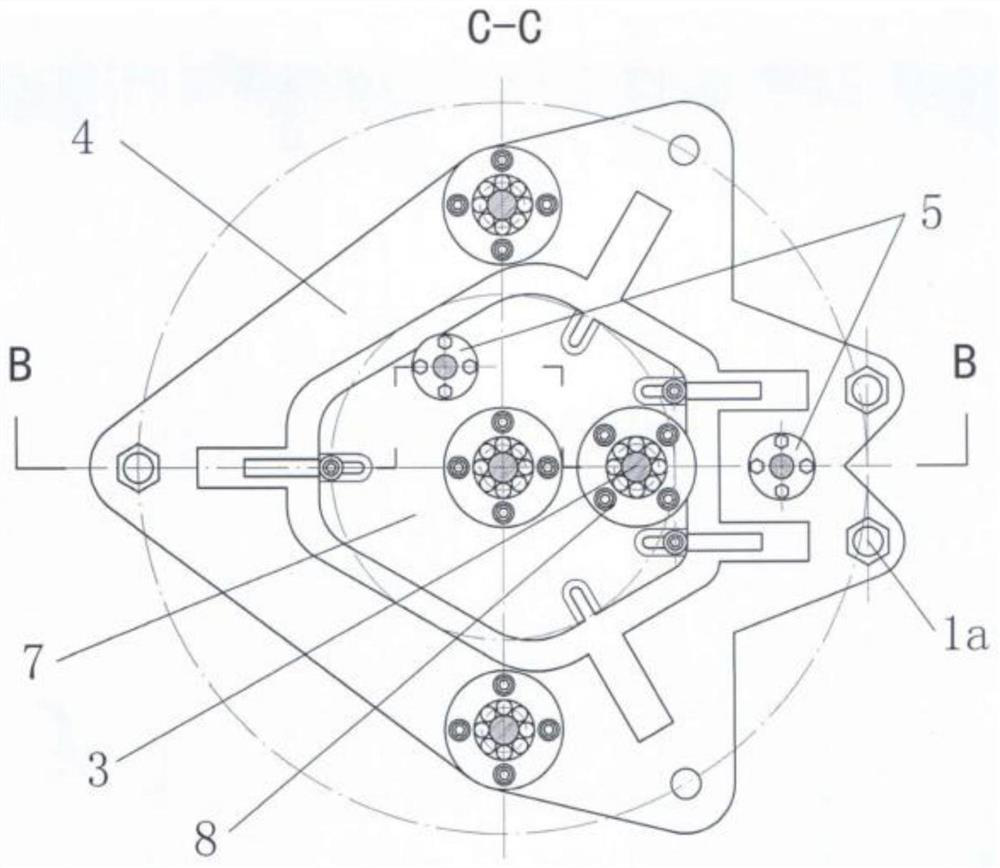
[0050] Such as Figure 1-Figure 4 , Figure 5-Figure 8 and Figure 9-Figure 26 As shown, the dual-drive manipulator with special-shaped super-flexible elastic skeleton in this embodiment includes an upper seat plate 2 and a base plate 10, two screw shaft servo motors 1 are installed at intervals on the upper seat plate 2, and two screw shaft servo motors 1 The screw nuts are respectively connected to the hollow finger front section drive plate 4 and the finger root drive plate 7 through the screw nut seat 5, and the ends of the two screw screws are respectively supported on the base plate 10 through two bearings with seats 11, and the upper base plate 2 and the base The plates 10 are fixed into a whole by two sets of guide connecting rods 3, each set of guide connecting rods 3 includes two guide connecting rods 3, and two linear bearings...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More