

A Modeling Method for Robot Cables Constrained by Clamps
A modeling method and robot technology, applied in the direction of constraint-based CAD, instrumentation, computer-aided design, etc., can solve problems such as clamp constraints are not considered
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
[0051] The present invention comprises the following steps:
[0052]Step 1: Simplify the cable section of the high-precision operation robot into a circular section. Including the following:
[0053] 1. The section of the robot cable is a rigid circular section;
[0054] 2. Neglect the shear strain of the robot cable section;
[0055] 3. The length of the robot cable is much greater than the diameter of the cable, and the diameter of the robot cable is ignored;
[0056] 4. The center line of the robot cable is a smooth curve of order 2 or higher.
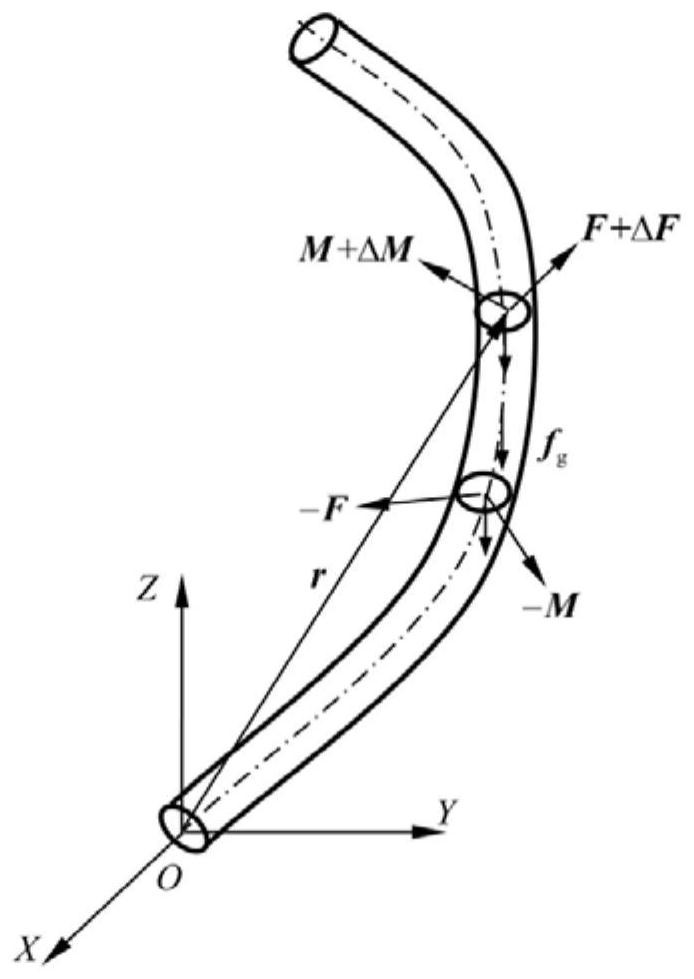
[0057] Step 2: The slow rotation or oscillation of the joints of the high-precision operation robot occurs when the robot stops for terminal operation, so the static analysis of the high-precision operation robot cable is performed. In formula (1)-(2): based on the Kirchhoff mechanical model, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More