REVO measuring head B-axis zero error calibration method
A technology of zero error and calibration method, applied in the direction of measuring devices, instruments, etc., can solve the problem of large center of REVO probe, and achieve the effect of high-precision calibration, simple method, easy operation and realization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the accompanying drawings.
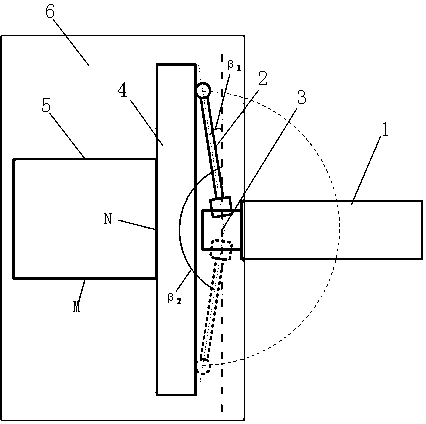
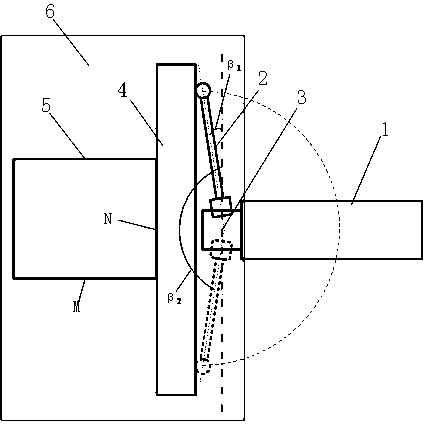
[0025] Such as figure 1 As shown, a REVO measuring head B-axis zero error calibration method of the present invention is used for the REVO five-axis measurement system under a non-orthogonal coordinate measuring machine. The tools used in the calibration process include: a square ruler 4, a square ruler 5 and a flat plate 6 ; Square ruler 4 is a 00-grade granite square ruler, the specification is 750×100×40mm, the flatness of the working surface is 2.1 μm, and the parallelism between the working surfaces is 3.2 μm; Square ruler 5 is a 00-grade granite square ruler, the specification is 500× 500×40mm, the flatness of the working surface is 1.6μm, and the parallelism between the working surfaces is 2.4μm; the plate 6 is a 000-grade granite slab, the specification is 1000×1000×150mm, and the flatness of the working surface is 2.5μm; granite is selected The square ruler, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com