Labyrinth feature recognition and walking method of humanoid robot
A humanoid robot and feature recognition technology, which is applied to instruments, motor vehicles, transportation and packaging, etc., can solve the problems of difficult tasks, high similarity and fork roads, and achieve low computing resource requirements and avoid computing and storage resource requirements low effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The maze feature recognition and walking method of a humanoid robot proposed by the present invention will be described in further detail below in conjunction with the embodiments and accompanying drawings, but the following embodiments are only illustrative, and the protection scope of the present invention is not limited by these examples. limit.
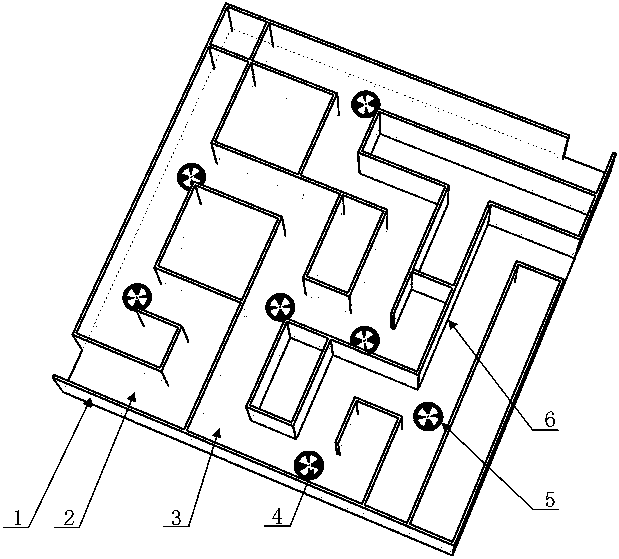
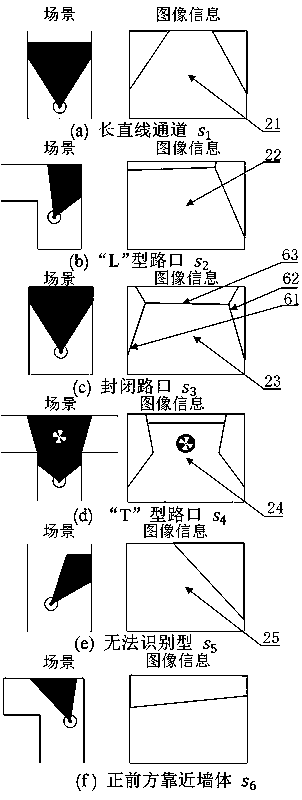
[0038] like figure 1 and figure 2 shown, where figure 2 The left figure shows the image information of the humanoid robot camera, the right figure shows the top view of the humanoid robot in different maze scenes, the circle represents the humanoid robot, and the shaded area formed by the closed polygon represents the humanoid robot’s camera in this pose. field of view.
[0039]The labyrinth in the method of the present invention comprises wall 1, road 2, intersection 3 and marker 4; Described wall 1, its corners are right angles, and wall surface color is solid color; Described intersection 2, comprises long linear ch...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More