Small unmanned aerial vehicle self-locating method based on web beacon correction
A small unmanned aerial vehicle, autonomous positioning technology, applied in the direction of navigation computing tools, etc., can solve the problem of poor accuracy of MEMS sensors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0083] In order to further illustrate the present invention, the following content is described in two steps respectively.
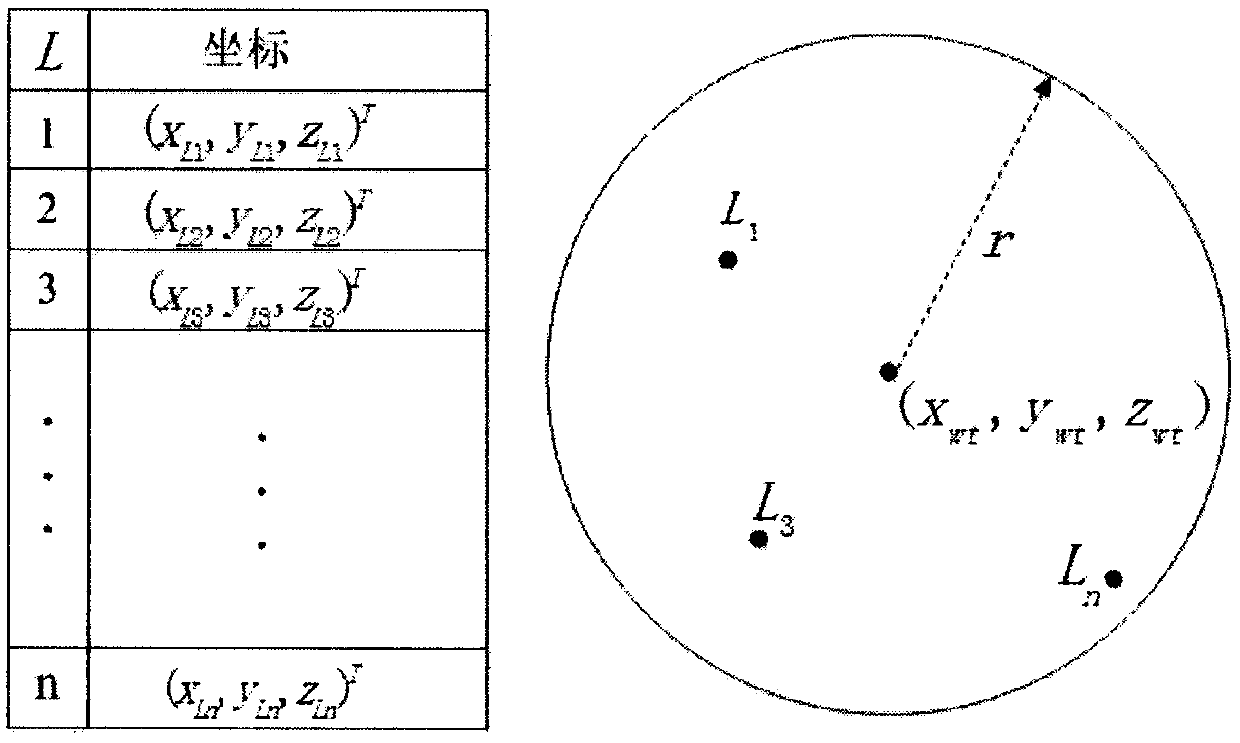
[0084] The northeast sky coordinate system is used as the world coordinate system in the positioning process, and the origin is the center of the airborne camera at the initial moment (indicated by the symbol "w"). Let the camera coordinate system at the initial moment coincide with the three axes of the world coordinate system.
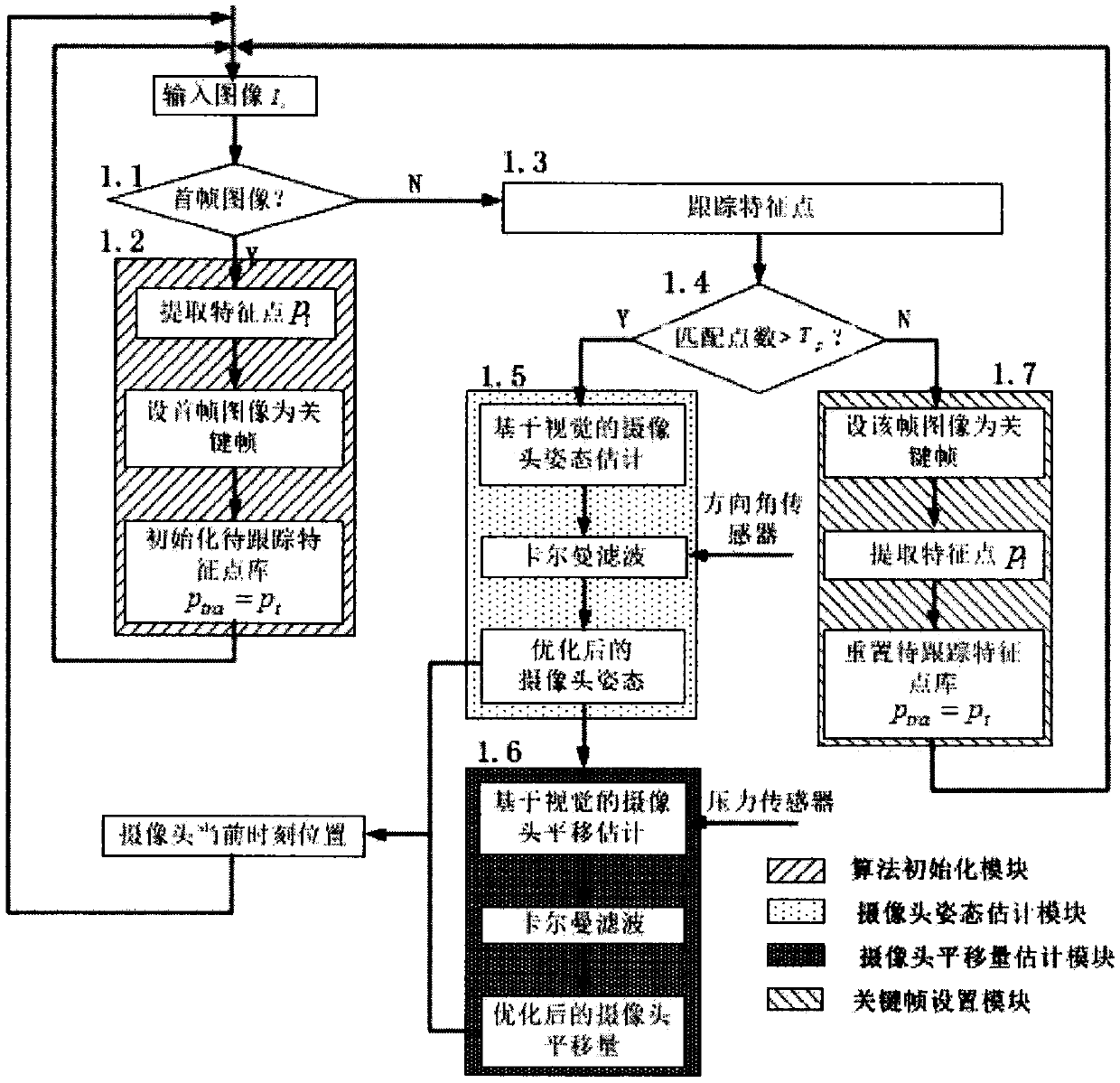
[0085] Step 1: Based on the camera, pressure sensor, and orientation angle sensor, determine the non-composition positioning method (MLVO), and the algorithm framework is as follows figure 1 shown. Including algorithm initialization, camera pose estimation, translation estimation and key frame setting four modules. Among them, attitude estimation and translation estimation are the core of the method framework, and the specific steps are as follows:
[0086] Step 1.1: If figure 1 As shown, let the image captured by the camer...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More