

A Distributed Multi-UAV Task Allocation Method in Uncertain Environment
A multi-UAV and task allocation technology, applied in the direction of instruments, three-dimensional position/channel control, control/regulation system, etc., can solve the problem of large amount of calculation, and achieve the effect of high success rate and high task income
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] The present invention will be further described below in conjunction with the accompanying drawings and embodiments, and the present invention includes but not limited to the following embodiments.
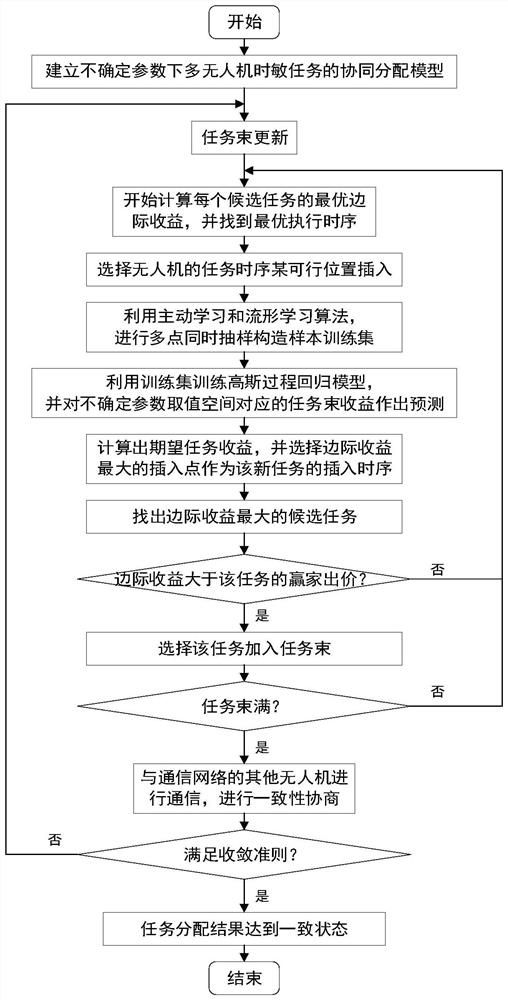
[0067] Such as figure 1 Shown, the steps of the present invention are as follows:
[0068] Step 1: Cooperative assignment model for multi-UAV time-sensitive tasks under uncertain parameters
[0069] UAV formation by N a It consists of two drones, all of which are of the same type. There are N in the task execution area t targets, the UAV formation needs to perform time-sensitive tasks for each target, and the execution time of each time-sensitive task is t j (j=1,2...,N t ), and its time window constraints are as follows:
[0070] ET j ≤t j ≤LT j (1-1)
[0071] Among them, ET j is the earliest allowable execution time of task j, LT j is the latest allowable start execution time of task j. The execution of a time-sensitive task must satisfy the time window cons...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More