

A Multi-agent Cooperative Task Assignment Method Without Conflict
A task allocation and task technology, applied in data processing applications, instruments, calculations, etc., can solve problems such as agent conflicts and difficulty in taking into account time consumption at the same time, so as to avoid path conflicts, reduce task allocation time, and reduce calculation time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] Below in conjunction with accompanying drawing and specific implementation, the present invention is described in further detail:
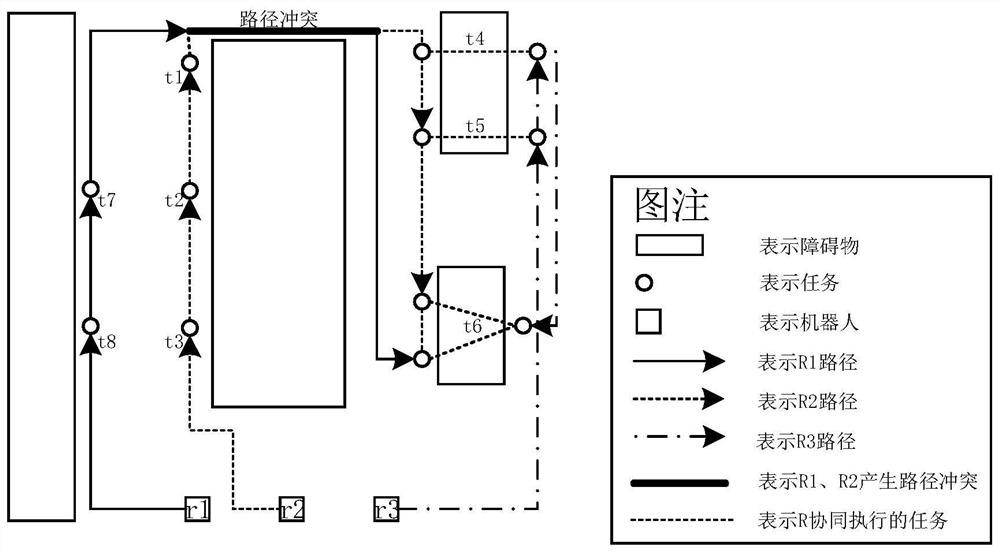
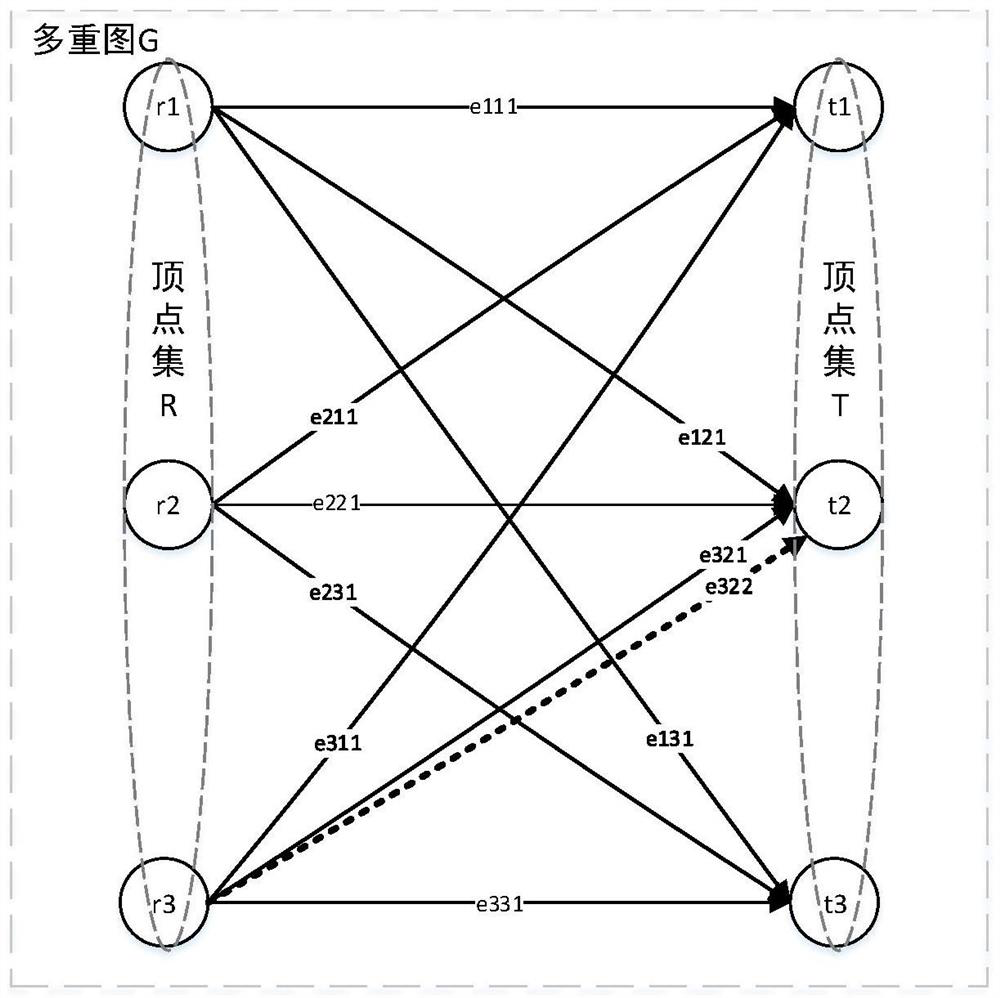
[0061] The embodiment is as follows: 8 tasks are assigned to 3 agents, and two complex tasks need to be executed by two agents respectively.
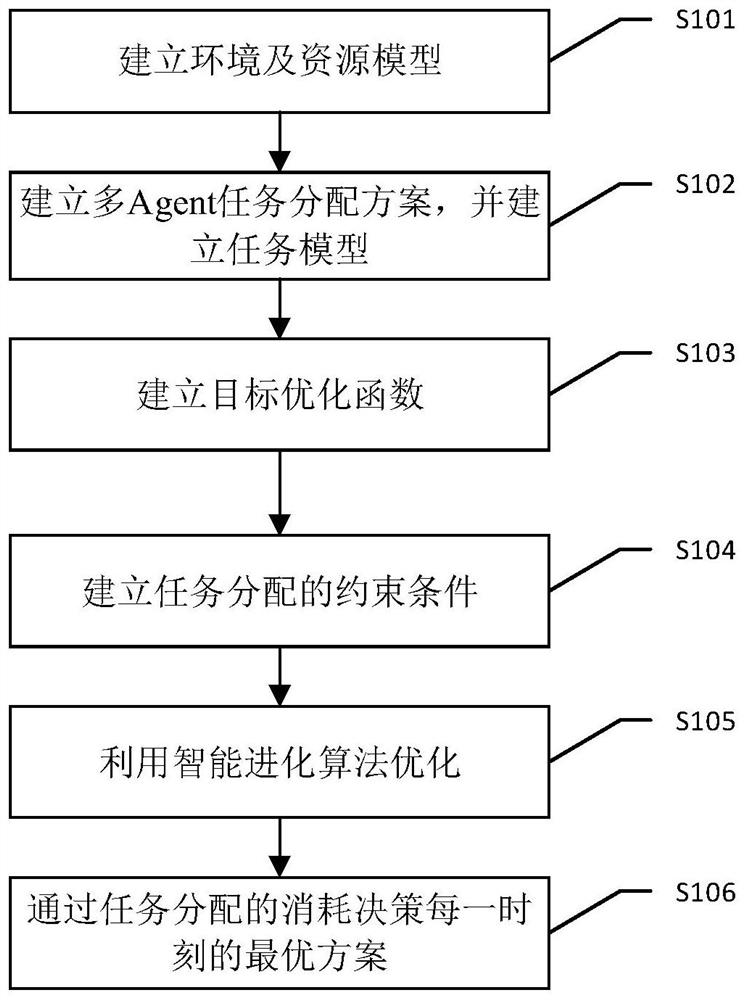
[0062] Step S101, establish an environment and resource model, represent the environment resource using a grid, and map the agent position and task position to the grid points:
[0063] A={a xy |a xy ∈{0,1},x∈{1,L x},y∈{1,L y}}, where a xy =1 means the grid point (x, y) can pass through, a xy =0 means the grid point (x, y) cannot pass through;
[0064] L x : Indicates the number of grid points in the abscissa direction, L x = 10;
[0065] L y : Indicates the number of grid points in the ordinate direction, L y = 16;
[0066] S R ={s r1 ,s r2 ,...,s ri ...,s rn}: represents the initial position set of the agent, where, S ri Represents the r in the agent set i initial position;
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More