

Composite mechanical arm-rope system mechanism used for capturing space debris
A space debris and robotic arm technology, applied in the field of aerospace, can solve the problems of irreversible capture process, broken debris, and difficult operation of rotating targets, so as to achieve good capture stability, reduce space occupation, and improve capture reliability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
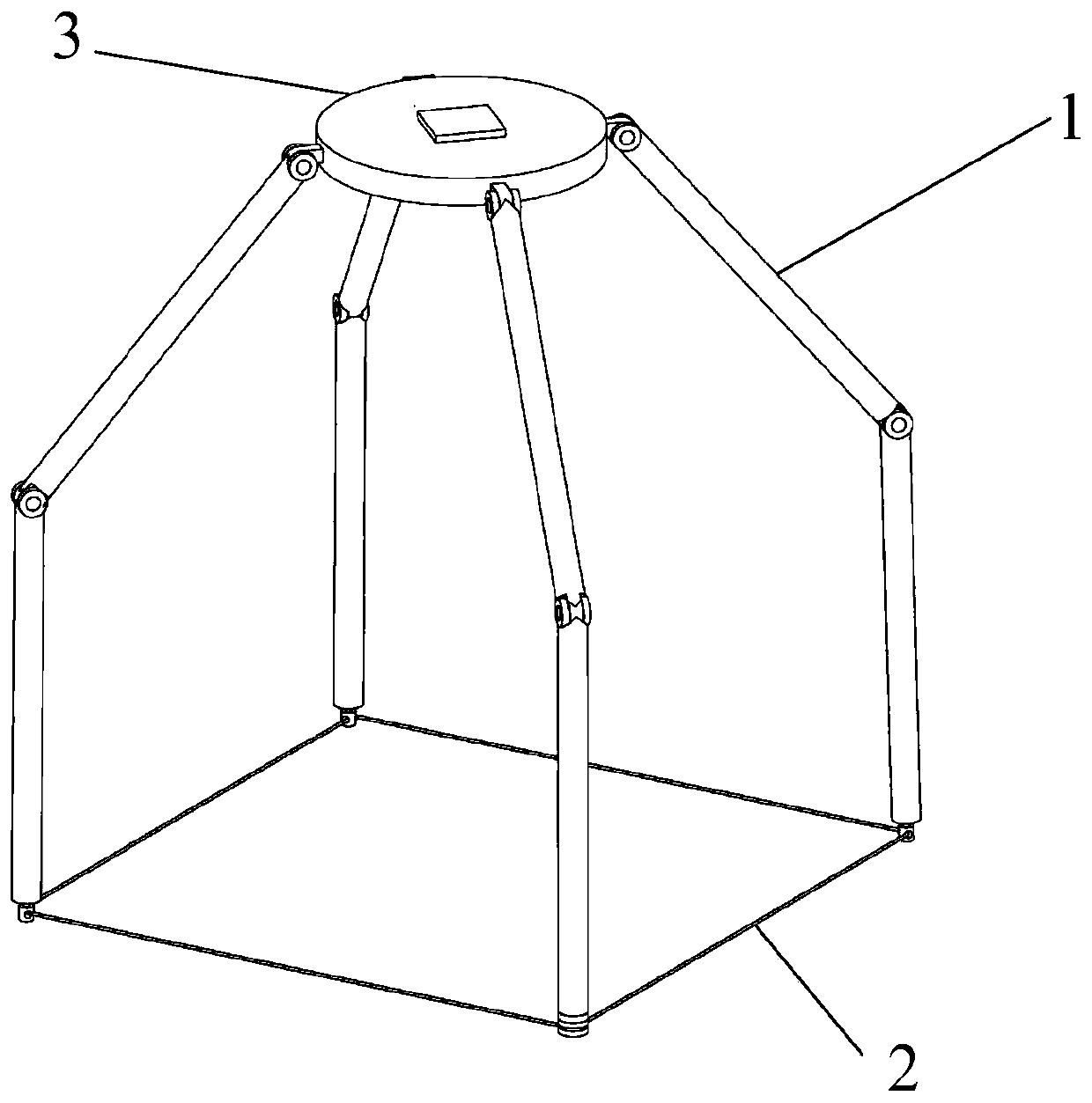
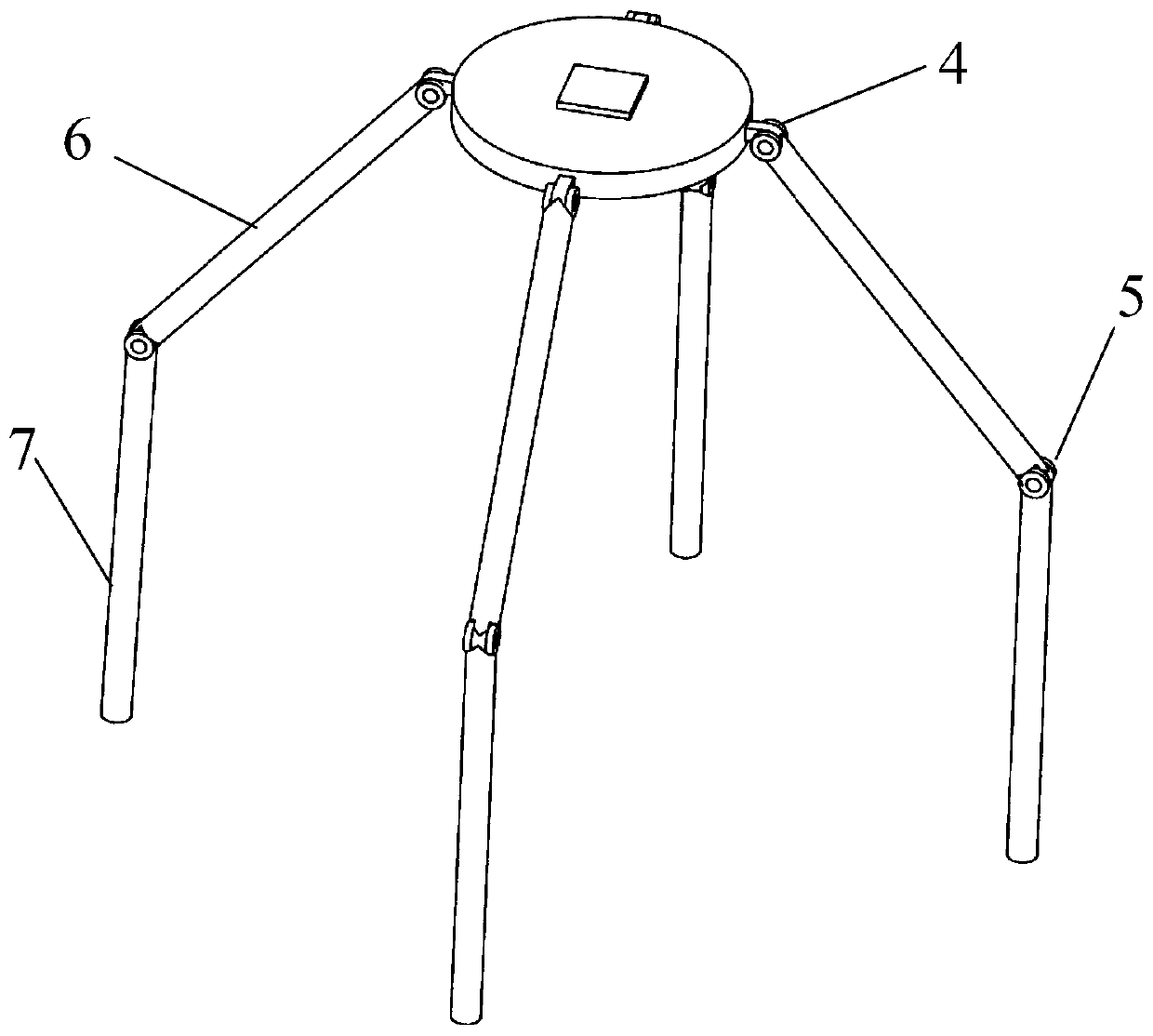
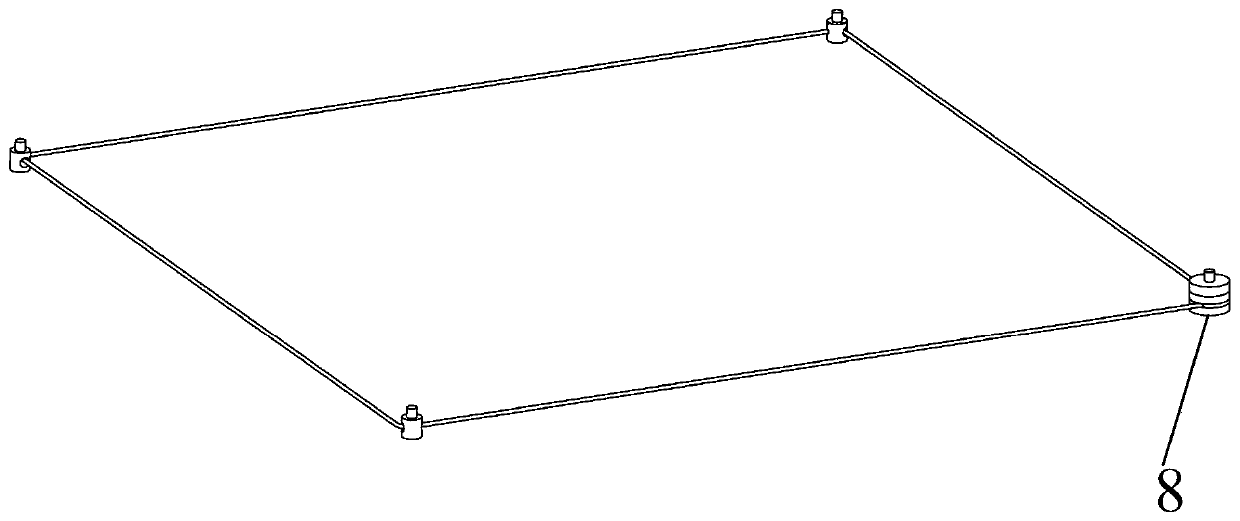
[0035] Such as figure 1 , figure 2 , image 3 As shown, a composite manipulator-tether mechanism for capturing space debris disclosed in this embodiment includes an installation platform 3, a manipulator envelope 1, a shrinking rope 2 and a closed reel 8 for rope retraction . Described mechanical arm envelope is made up of four mechanical arms, and each mechanical arm has two joints, and each mechanical arm is made up of top driving motor 4, middle driving motor 5, upper arm 6, and middle arm 7. A compound manipulator-tether mechanism capture method for capturing space debris disclosed in this embodiment includes the following steps:
[0036] Step 1: When the composite mechanical arm-tether mechanism for capturing space debris is loaded into the rocket for launch, the top drive motor 4 drives the upper arm 6 to fold inward, and the middle drive motor 5 drives the middle arm 7 to fold upward , the reel drive motor drives the closed reel 8 to control the retraction rope 2 t...
Embodiment 2
[0041] Such as figure 1 , figure 2 , image 3 As shown, a composite manipulator-tether mechanism for capturing space debris disclosed in this embodiment includes an installation platform 3, a manipulator envelope 1, a shrinking rope 2 and a closed reel 8 for rope retraction . Described mechanical arm envelope is made up of four mechanical arms, and each mechanical arm has two joints, and each mechanical arm is made up of top driving motor 4, middle driving motor 5, upper arm 6, and middle arm 7. A compound manipulator-tether mechanism capture method for capturing space debris disclosed in this embodiment includes the following steps:
[0042]Step 1: When the composite mechanical arm-tether mechanism for capturing space debris is loaded into the rocket for launch, the top drive motor 4 drives the upper arm 6 to fold inward, and the middle drive motor 5 drives the middle arm 7 to fold upward , the reel drive motor drives the closed reel 8 to control the retraction rope 2 to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More