

Mobile robot path planning method based on parameterized level set
A mobile robot, path planning technology, applied in the direction of navigation calculation tools, etc., can solve the problems of large amount of calculation, rough results, large path fluctuation, etc., to achieve the effect of improving quality and avoiding calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The following further clarifies the present invention with reference to the drawings and specific embodiments in the C-shaped labyrinth. It should be understood that the embodiments are only used to illustrate the present invention.
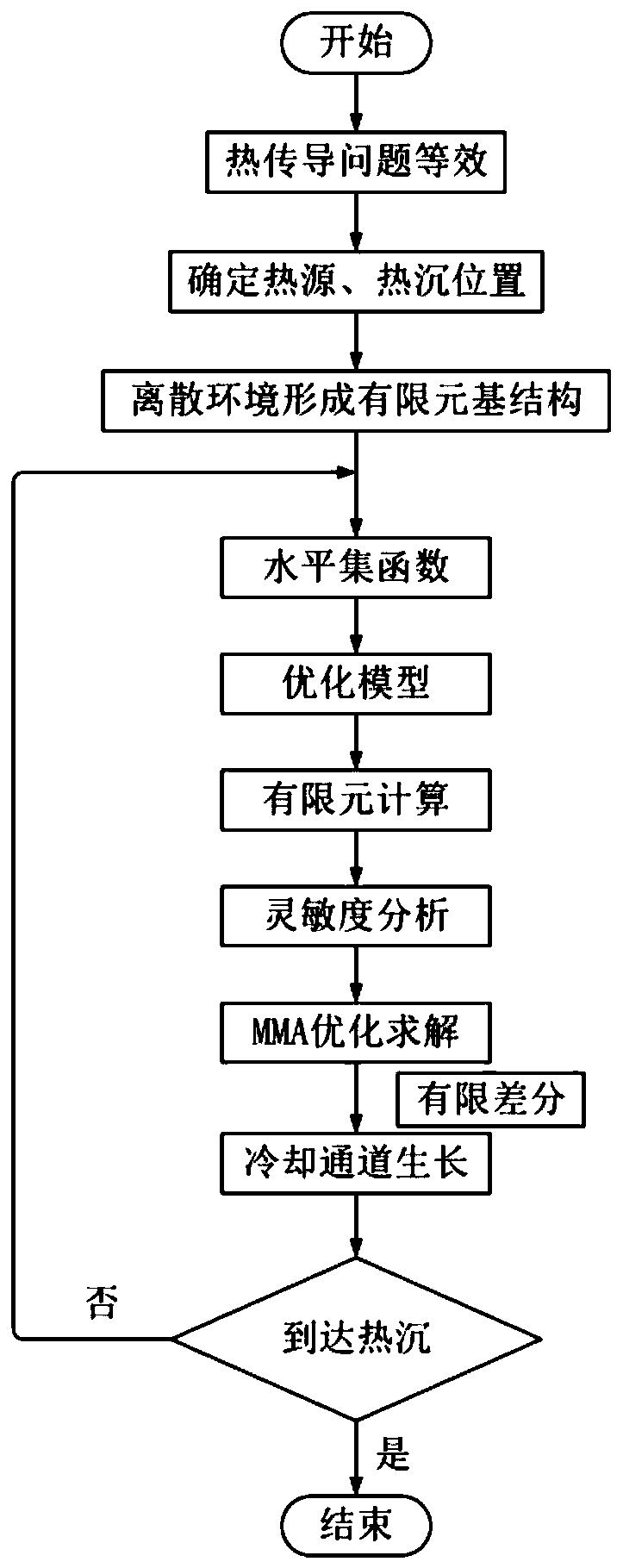
[0052] Such as figure 1 As shown, the mobile robot path planning method based on parameterized level sets provided by the present invention includes the following steps:
[0053] 1) Construct the analysis domain and the location of the heat source and heat sink for the equivalent heat conduction problem:
[0054] The mobile robot path planning problem is equivalent to the topology optimization problem of the heat conduction path, the obstacle area is mapped to the non-design domain, the mobile robot free motion space is mapped to the design domain, the mobile robot starting point is mapped to the heat source, and the mobile robot end point is mapped to the heat sink ;
[0055] 2) Establish the finite element calculation model of the base structure...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More