

All-terrain self-balancing taking-off and landing platform for multi-rotor-wing unmanned aerial vehicle
A multi-rotor UAV and take-off and landing platform technology, applied to aircraft parts, ground devices, portable landing gear, etc., can solve the problems of long time-consuming leveling and difficulty in ensuring levelness, so as to reduce output costs and shorten operation time , Improve the efficiency of inspection operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] In the following description, for purposes of explanation, numerous specific details are set forth in order to provide a thorough understanding of one or more embodiments. It may be evident, however, that these embodiments may be practiced without these specific details. In other instances, well-known structures and devices are shown in block diagram form in order to facilitate describing one or more embodiments.
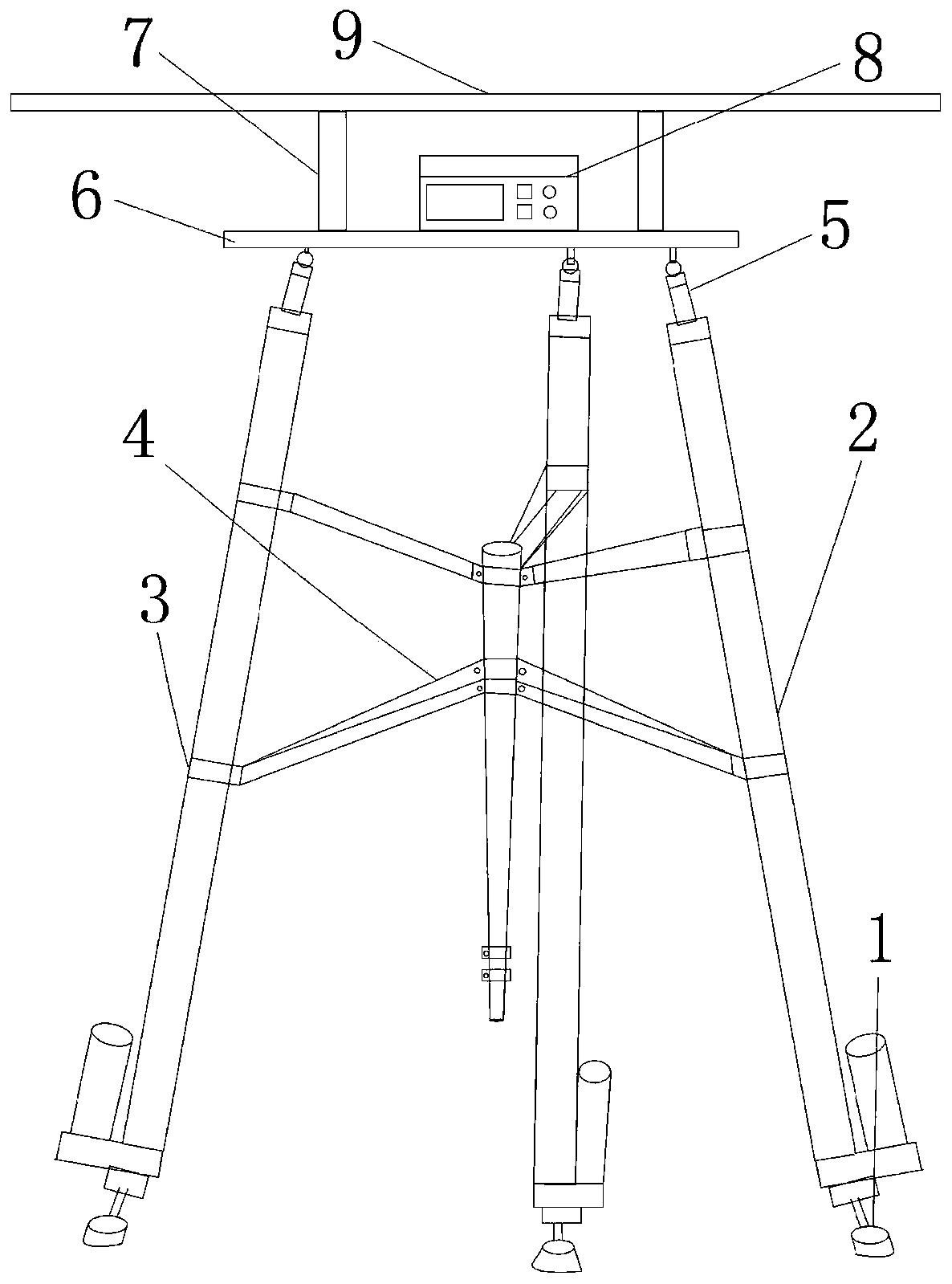
[0017] figure 1 The structure of the multi-rotor UAV all-terrain self-balancing take-off and landing platform provided by the embodiment of the present invention is shown.
[0018] Such as figure 1 As shown, the multi-rotor UAV all-terrain self-balancing take-off and landing platform provided by the present invention includes: universal adjustment feet 1, electric push rod 2, push rod clamp 3, push rod support frame 4, universal joint 5, Support connecting plate 6, table support 7, balance controller 8 and platform table top 9; Wherein, electric push rod 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More