Distributed command filtering fuzzy control method of multi-robot system
A multi-robot, fuzzy control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as consistent tracking control of uncertain multi-robot systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0125]Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
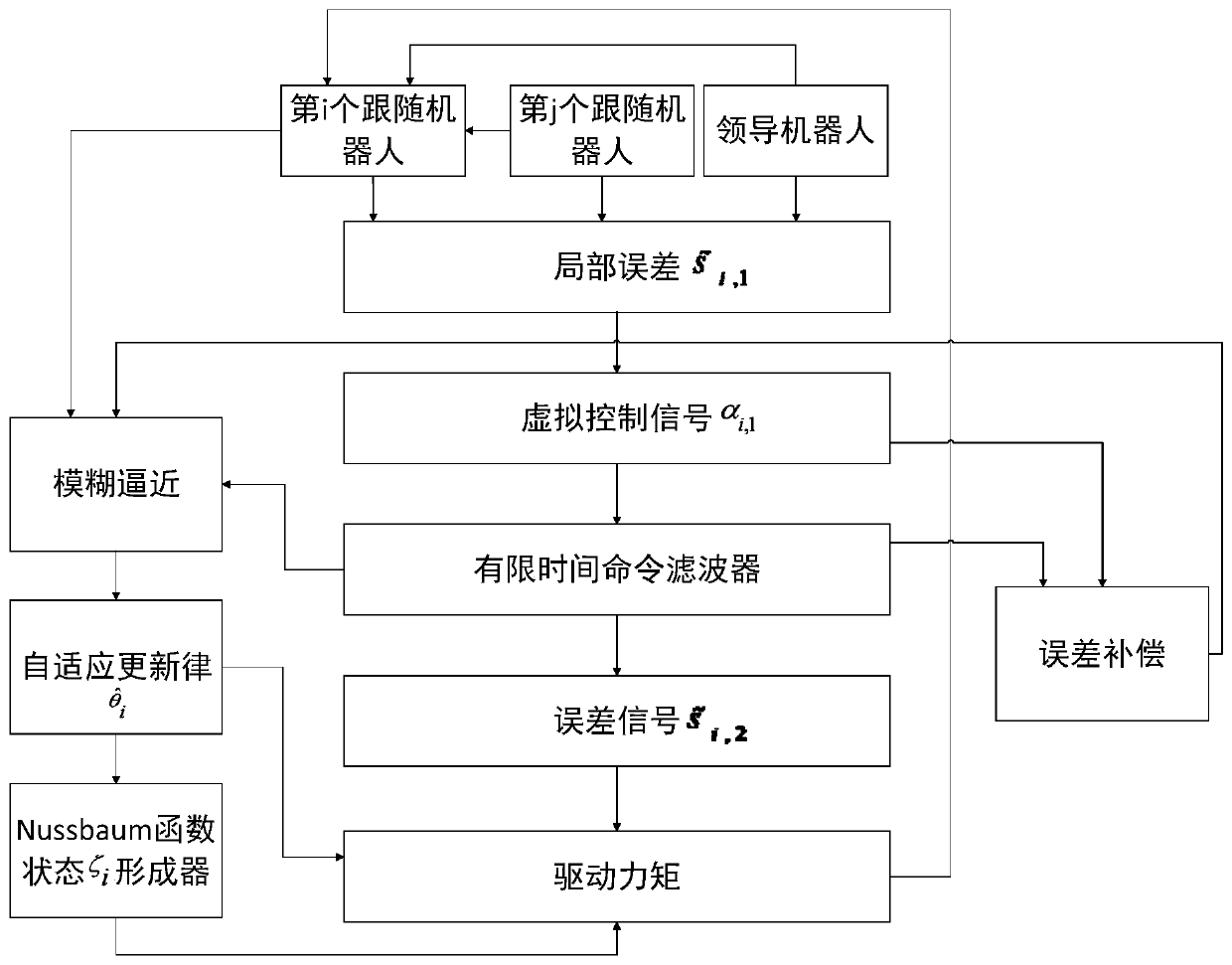
[0126] Such as figure 1 As shown, the distributed command filtering fuzzy control method of the multi-robot system includes the following steps:
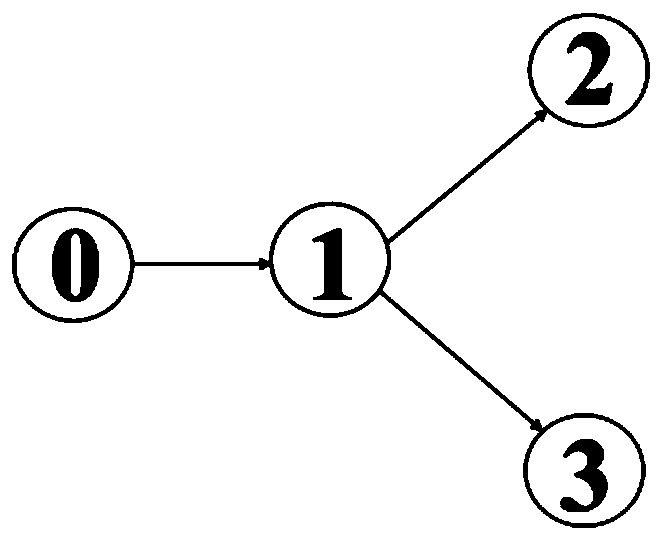
[0127] It is assumed that the multi-robot system has N follower robots and 1 leader robot, the follower robot node set is denoted as υ={1,...,N}, and the leader robot node is denoted as 0.
[0128] The communication topology relationship between N follower robots is defined by a directed graph express.
[0129] Among them, the edge set
[0130] Define the adjacency matrix A=[a mn ]∈R N×N , a mn Indicates the weight of the edge, R N×N Indicates that the matrix dimension is N×N dimensions.
[0131] If there is a directed edge (m,n)∈ε, node n is called the parent node of node m, and node m is called the child node of node n.
[0132] The set of neighbor nodes of node m is N m ={n|(n,m)∈ε}, if...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More