

A Workpiece Pose Recognition Method Based on Quadratic Surface Features
A technology of quadratic surfaces and recognition methods, applied in image analysis, image enhancement, instruments, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
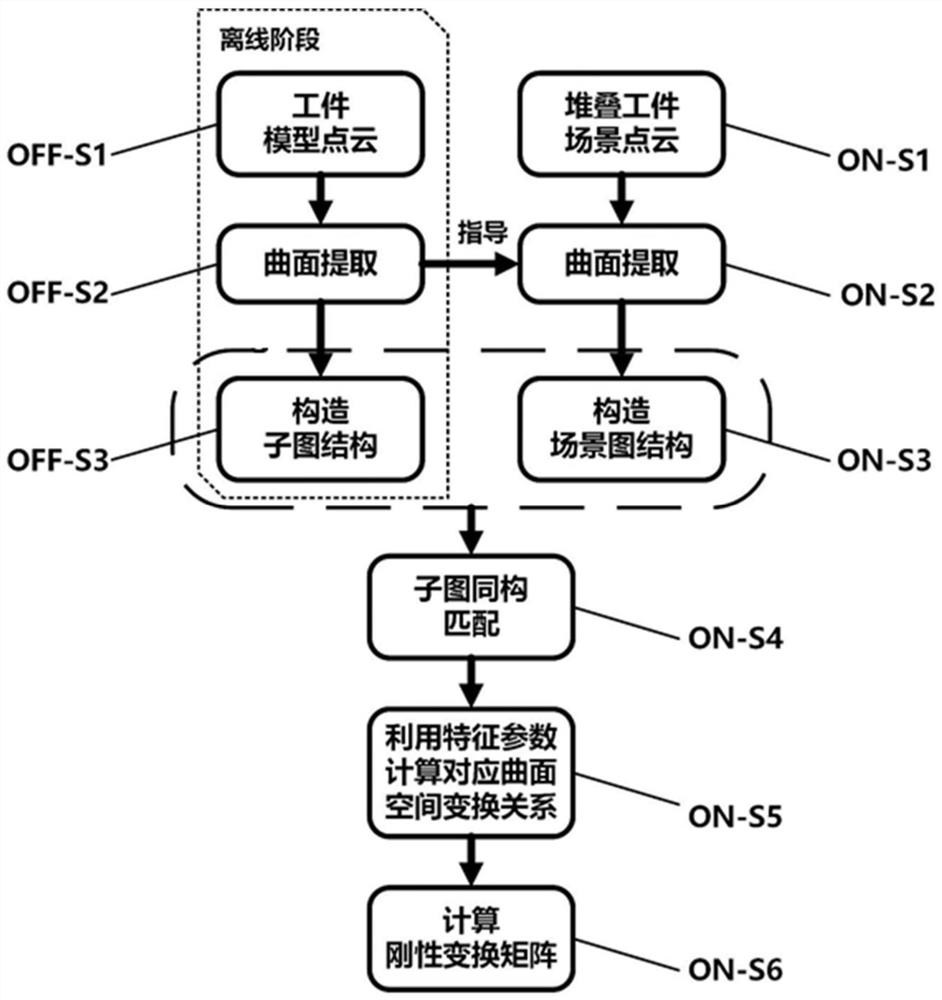
[0051] Such as figure 1 As shown, this embodiment provides a workpiece pose recognition method based on quadratic surface features, which is mainly divided into two parts: offline training and online pose recognition. The surface parameters to be extracted are set during offline extraction, and the online phase will be Extract all the surfaces of this parameter, including the following steps:
[0052] Offline building model subgraph refers to the preparation stage before the operation of the robot, which is only processed once:
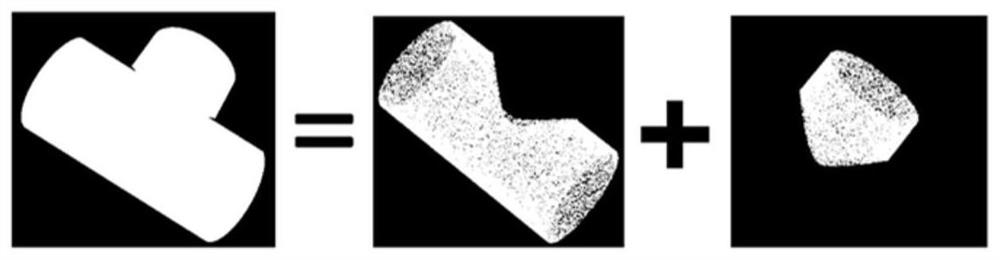
[0053] (1) Read the model point cloud data, such as figure 2 As shown, the model of the present embodiment adopts the tee pipe parts model;
[0054] (2) Split the specified quadratic surface from the model, and calculate the spatial geometric relationship between the quadric surface characteristic parameters and the quadric surface, the centroid distance, etc. The spatial geometric relationship includes the distance relationship between points and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More