Driverless remote assistance method, device and equipment and storage medium
A remote assistance and unmanned driving technology, applied in two-dimensional position/channel control, vehicle position/route/altitude control, registration/instruction of vehicle operation, etc., can solve the problem that the driving operation has a greater impact and takes more time , consumption and other issues to achieve the effect of reducing the consumption of human resources and avoiding network speed fluctuations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
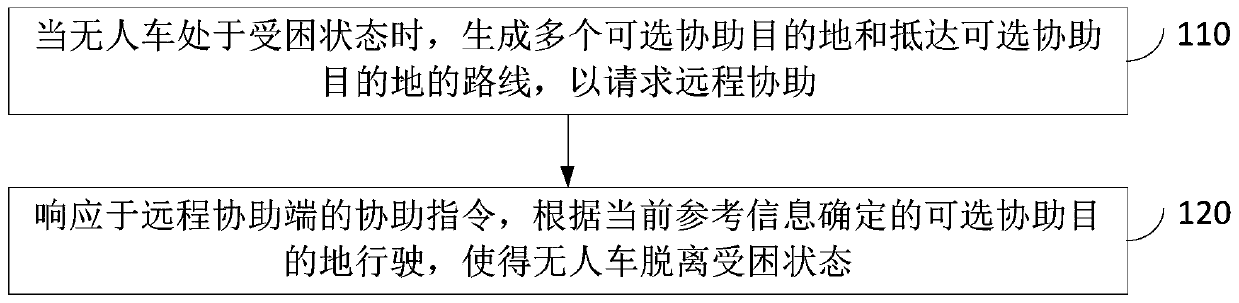
[0037] Figure 1A It is a flow chart of a remote assistance method for an unmanned vehicle provided by Embodiment 1 of the present invention. This embodiment is applicable to situations where an unmanned vehicle is in trouble and needs to get out of trouble. This method can be executed by an unmanned remote assistance device , the device can be implemented by hardware and / or software, and can generally be integrated in an unmanned vehicle. The method specifically includes the following steps:
[0038] Step 110, when the unmanned vehicle is in a trapped state, generate multiple optional assistance destinations and routes to the optional assistance destinations to request remote assistance;
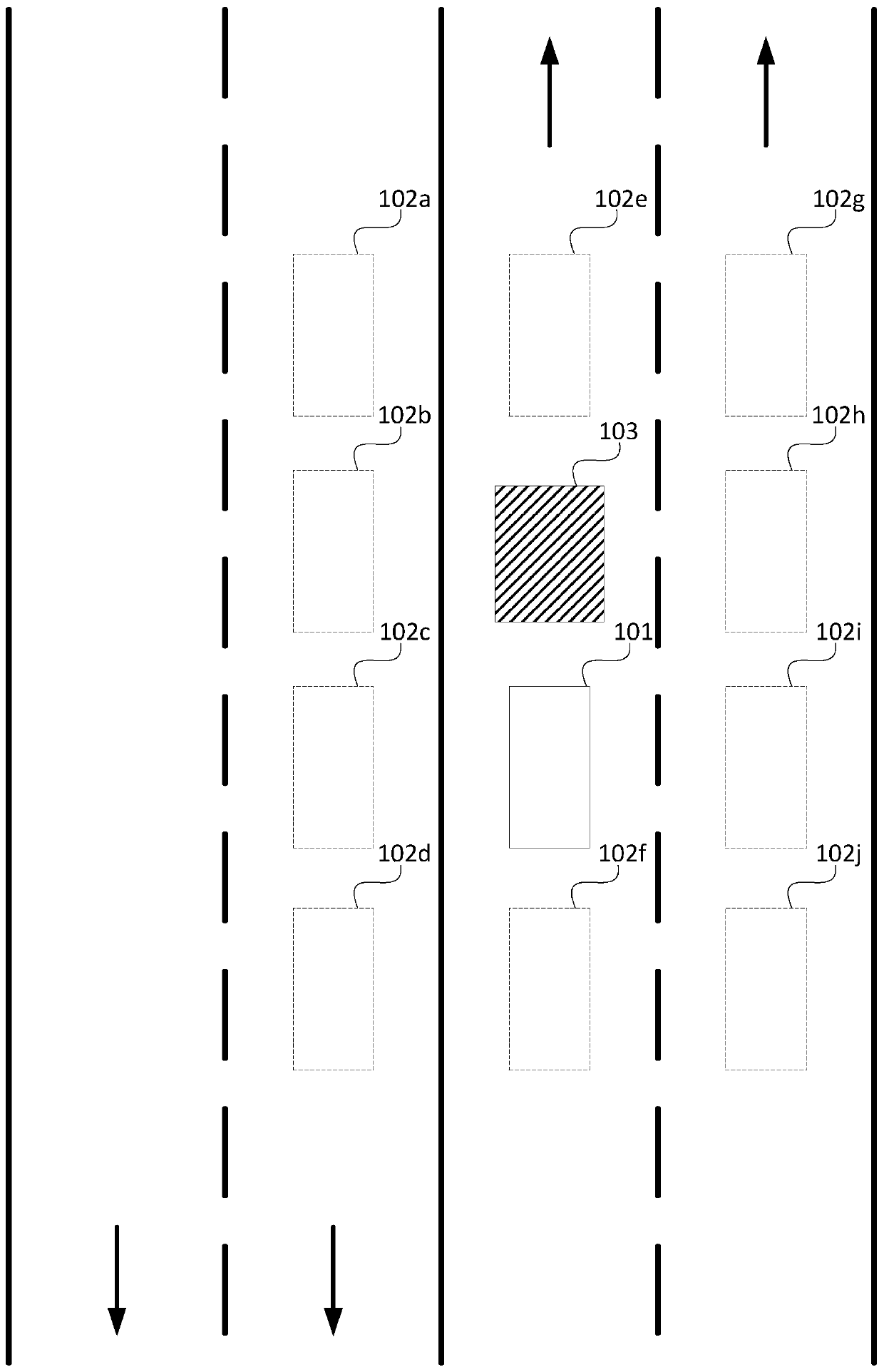
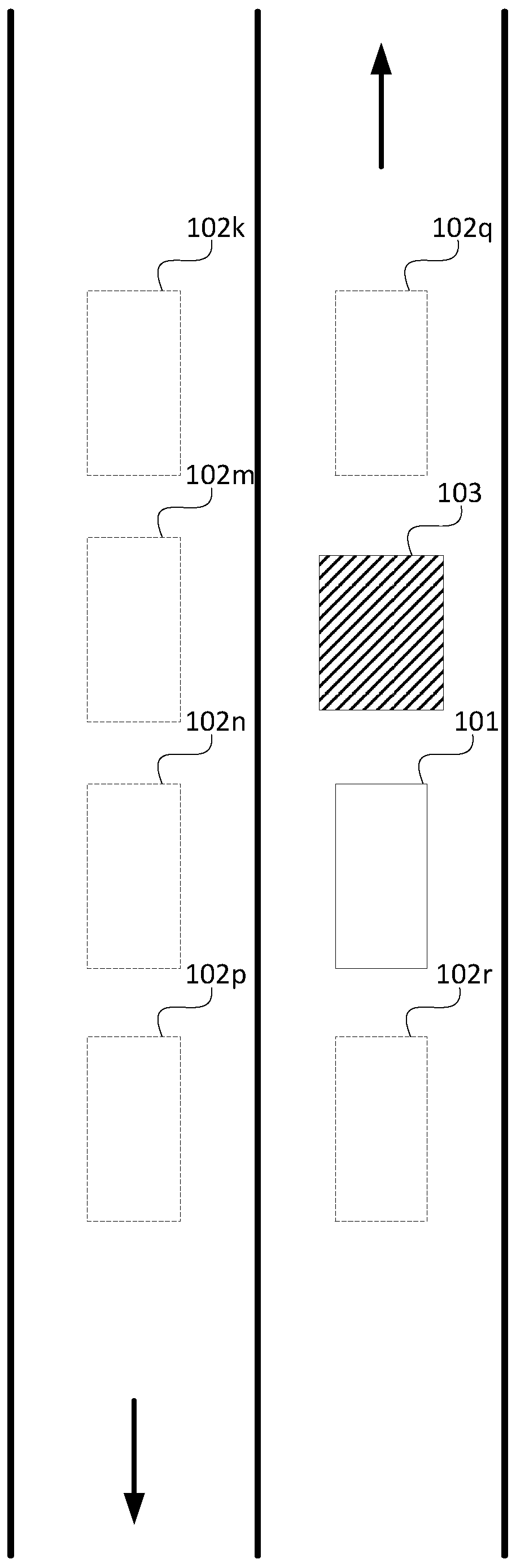
[0039] Among them, when the unmanned vehicle encounters road conditions that cannot be handled in the automatic driving mode, it will cause the vehicle to stop running, and remote assistance is required to get out of trouble. At this time, the unmanned vehicle is in a trapped state. For exa...
Embodiment 2
[0048] figure 2 It is a flowchart of an unmanned remote assistance method provided by Embodiment 2 of the present invention. The technical solution of this embodiment is further refined on the basis of the above technical solution, wherein the method specifically includes:
[0049] Step 210, when the unmanned vehicle is in a trapped state, generate multiple optional assistance destinations and routes to the optional assistance destinations to request remote assistance;
[0050] Step 220, in response to the assistance instruction from the remote assistance terminal, drive according to the optional assistance destination determined by the current reference information, so that the unmanned vehicle escapes from the trapped state.
[0051] Step 230, according to the surrounding obstacle information of the optional assistance destination, determine whether the unmanned vehicle is out of the trapped state;
[0052] Among them, after the unmanned vehicle arrives at the optional ass...
Embodiment 3
[0058] image 3 It is a flow chart of a remote assistance method for an unmanned vehicle provided by Embodiment 3 of the present invention. This embodiment is applicable to situations where an unmanned vehicle is in trouble and needs to get out of trouble. This method can be executed by an unmanned remote assistance device , the device can be implemented by hardware and / or software, and can generally be integrated in a remote assistance device. The method specifically includes the following steps:
[0059] Step 310, according to the remote assistance request of the unmanned vehicle, display the current reference information, multiple optional assistance destinations and the route to the optional assistance destination to the assistance personnel on the automatic driving visual interface;
[0060] Among them, the optional assistance destination is located near the unmanned vehicle. When the remote assistance terminal receives the remote assistance request sent by the unmanned ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com