

Fast pose estimation algorithm for point-line feature visual slam system
A pose estimation algorithm and line feature technology, applied in the field of computer vision, can solve the problems that pure point features cannot meet the needs, and achieve the effect of improving efficiency, halving the amount of calculation, and calculating the height of small roads
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0037] In order to better understand the present invention, the technical solution of the present invention will be specifically described below through specific embodiments in conjunction with the accompanying drawings.
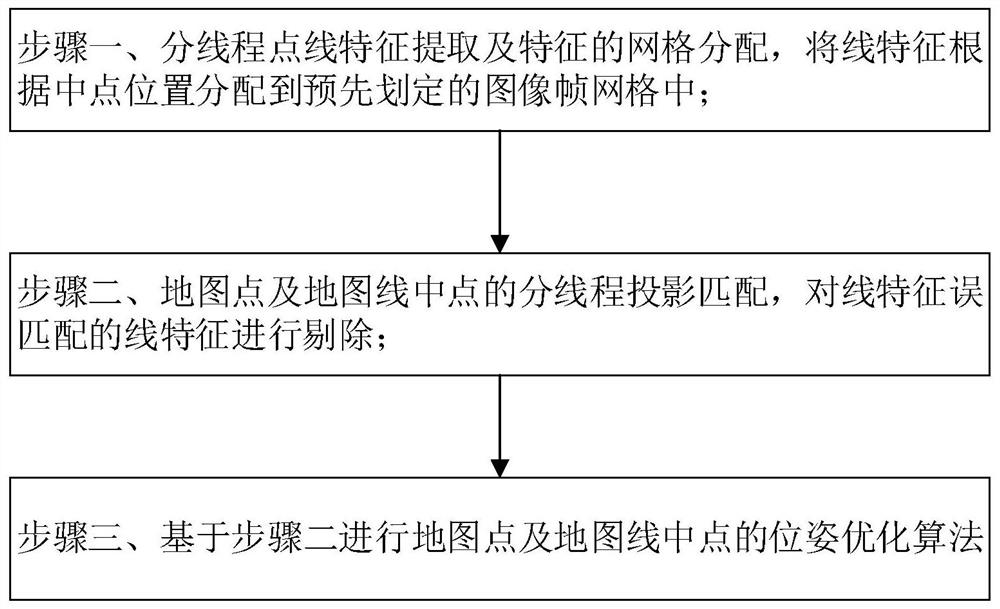
[0038] The invention proposes a grid pre-matching method based on line feature midpoints and an accelerated optimization algorithm of point features+map line midpoints. The matching method based on the midpoint of the line feature can avoid the complexity of grid pre-matching using the end point of the line feature, and the midpoint of the map line as the "fusion information" of the end point of the map line participates in the pose estimation, which can ensure that the information is fully used. Under the premise, the calculation amount of line features involved in pose estimation is directly halved. The applicable object of the present invention is a point-line SLAM system in visual SLAM. After completing the thread point and line feature extraction and g...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More