

Method for improving motion planning control precision of mechanical arm
A technology of control accuracy and motion planning, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the decline of tracking performance at the end of the manipulator, and achieve the effect of solving the decline in tracking performance and improving control accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0041] Embodiment 1 is an existing tension-dynamic model without a strategy in the case of possible loss of control signals, and Embodiment 2 is a tension-dynamic model of an extrapolation strategy in the case of possible loss of control signals in this patent.
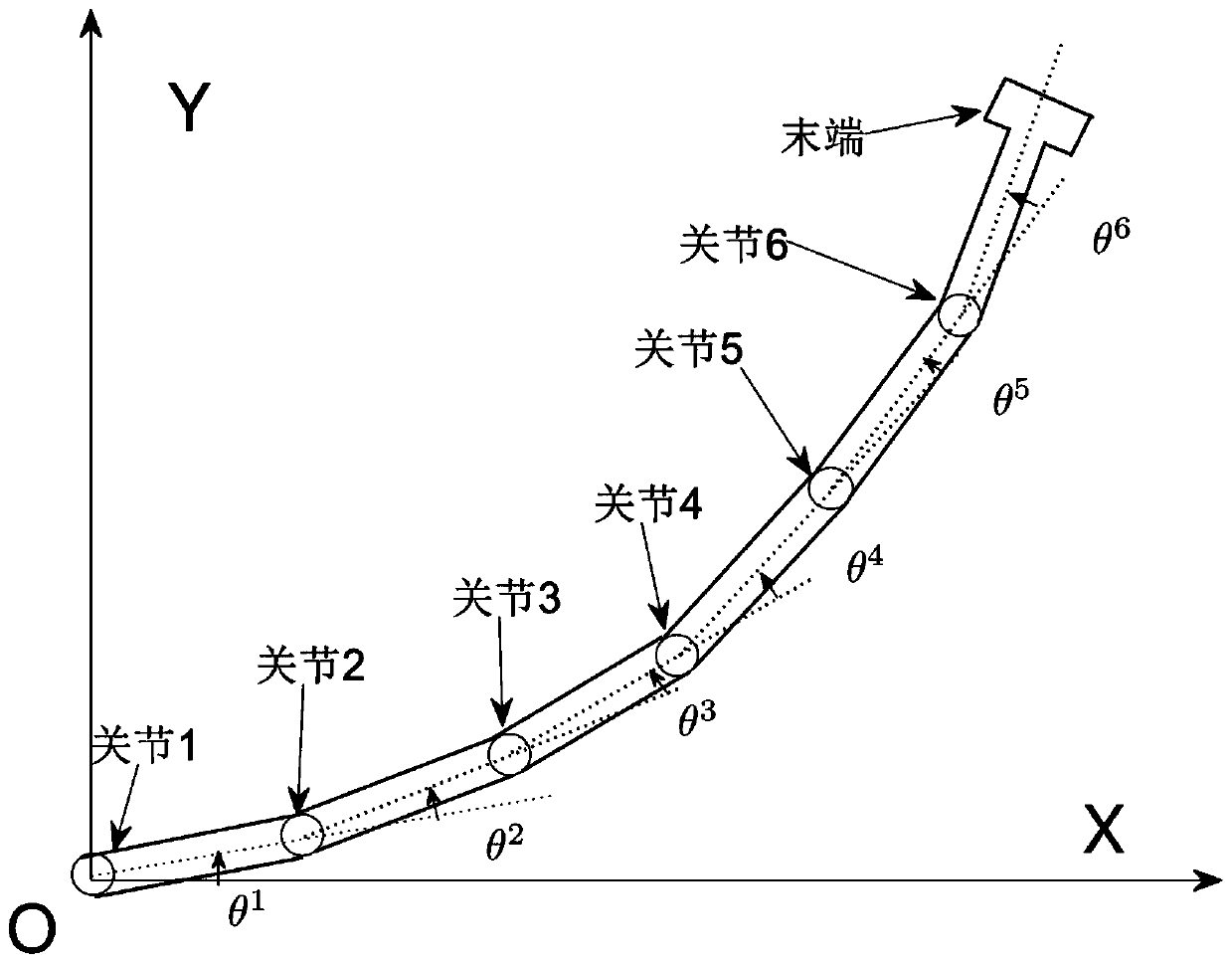
[0042] Such as figure 2 As shown, Embodiment 1 and Embodiment 2 are based on the six-link robotic arm model.
[0043] Example 1
[0044] A method for motion planning control of a mechanical arm, comprising the following steps:
[0045] According to the mechanical mechanism of the mechanical arm, the mathematical model of the mechanical arm is obtained, and the mathematical model is expressed by the following formula:
[0046]
[0047]
[0048] k represents the kth moment, f( ) is a nonlinear mapping function, θ k is the angle of the joint angle of the manipulator at the kth moment, is the actual end trajectory of the manipulator at the kth moment, is the ideal end trajectory of the manipulator at the kth...
Embodiment 2
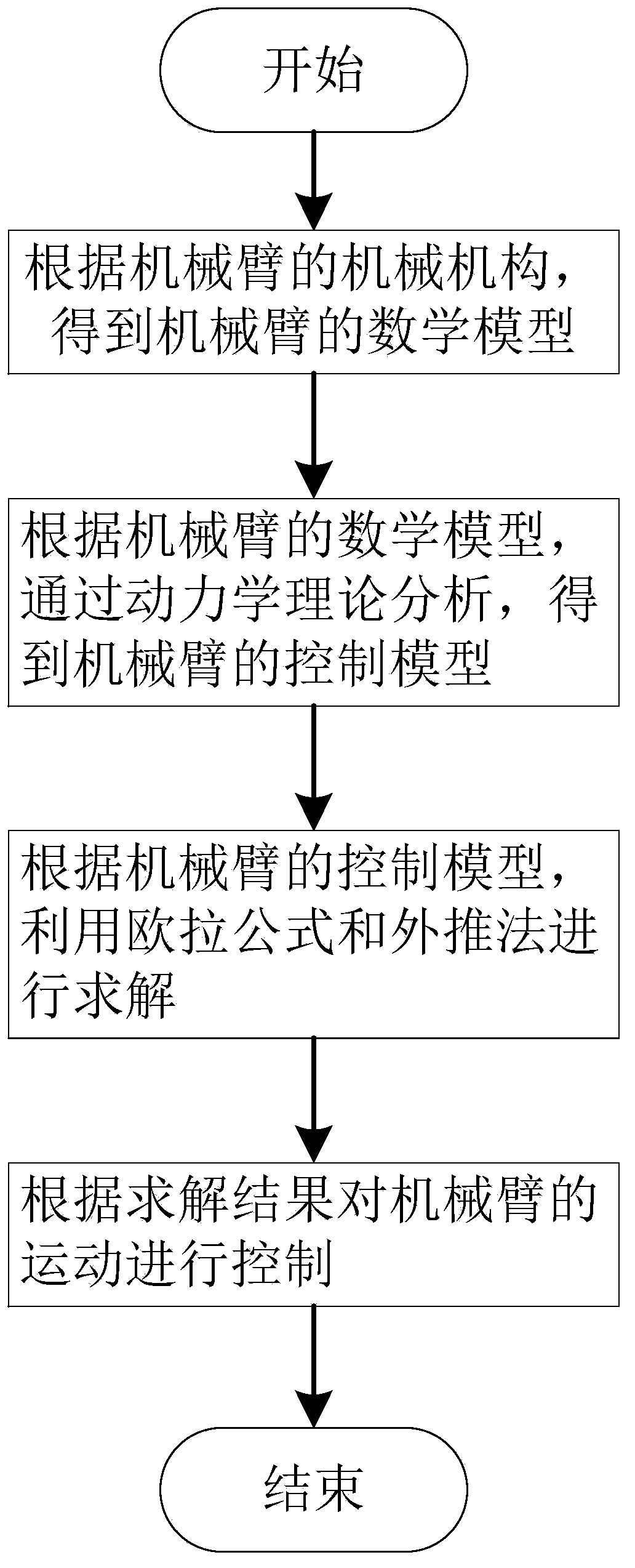
[0061] Such as figure 1 As shown, a method of improving the control accuracy of the motion planning of the manipulator includes the following steps:
[0062] According to the mechanical mechanism of the mechanical arm, the mathematical model of the mechanical arm is obtained, and the mathematical model is expressed by the following formula:
[0063]
[0064]
[0065] k represents the kth moment, f( ) is a nonlinear mapping function, θ k is the angle of the joint angle of the manipulator at the kth moment, is the actual end trajectory of the manipulator at the kth moment, is the ideal end trajectory of the manipulator at the kth moment, is the time derivative of the angle of the joint angle of the manipulator at the kth moment, is the time derivative of the end trajectory of the manipulator at the actual kth moment, J( ) is the Jacobian matrix;
[0066] According to the mathematical model of the manipulator, the control model of the manipulator is obtained throug...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More