

A coaxial dual-rotor unmanned aerial vehicle ground flight test platform and test method
A coaxial dual-rotor, flight test technology, applied in the direction of aircraft component testing, etc., can solve the problems of lack of flight data upload, processing and storage, inability to collect UAV flight data, and too many platforms with six degrees of freedom. Measuring requirements, reducing the complexity of the mechanism, and the effect of high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
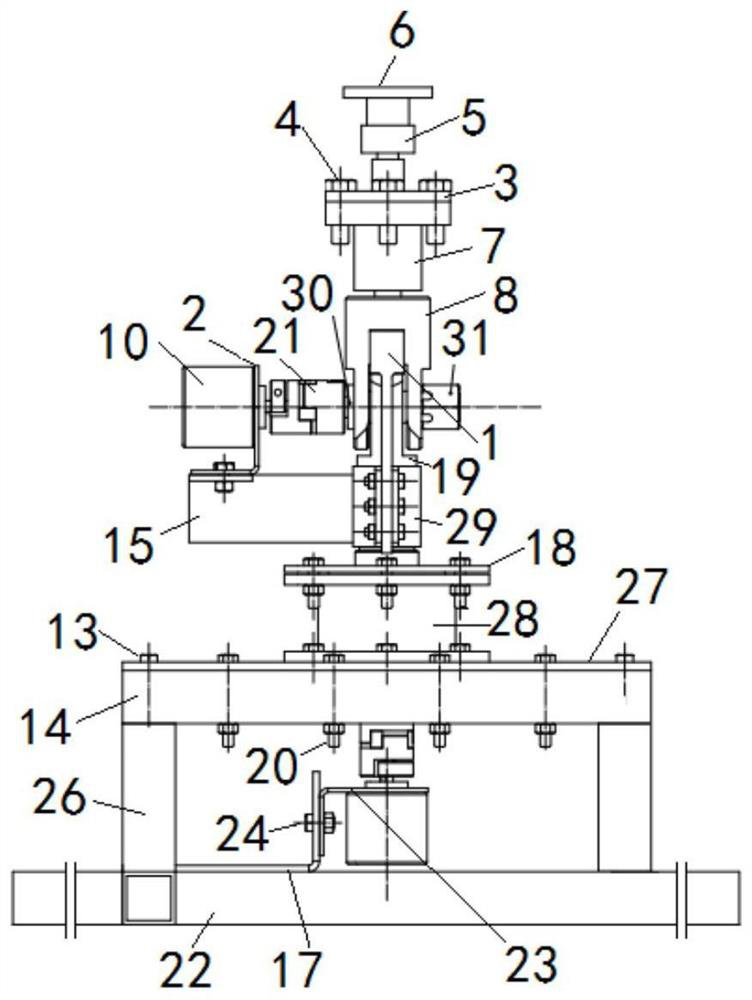
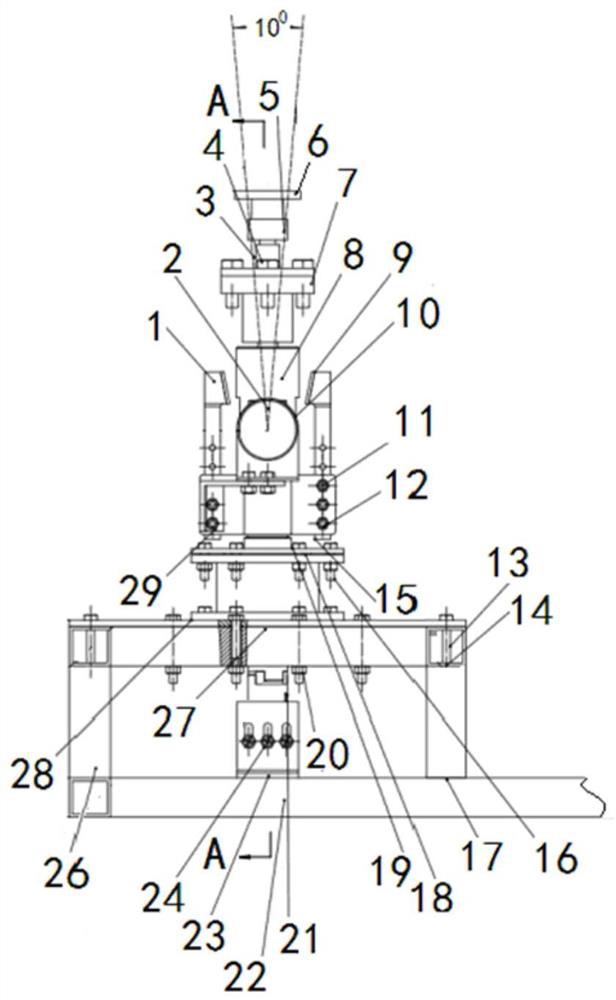
[0065] Embodiment 1: as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 , Figure 7 , Figure 8 and Figure 9 As shown, a coaxial dual-rotor UAV ground flight test platform includes a mechanical part and a control part, and the control part includes a hardware module and a software module.
[0066] The mechanical part includes a frame part, a main part and a limit part, and the main part is placed on the upper part of the frame. The limiting part is connected with the main part.
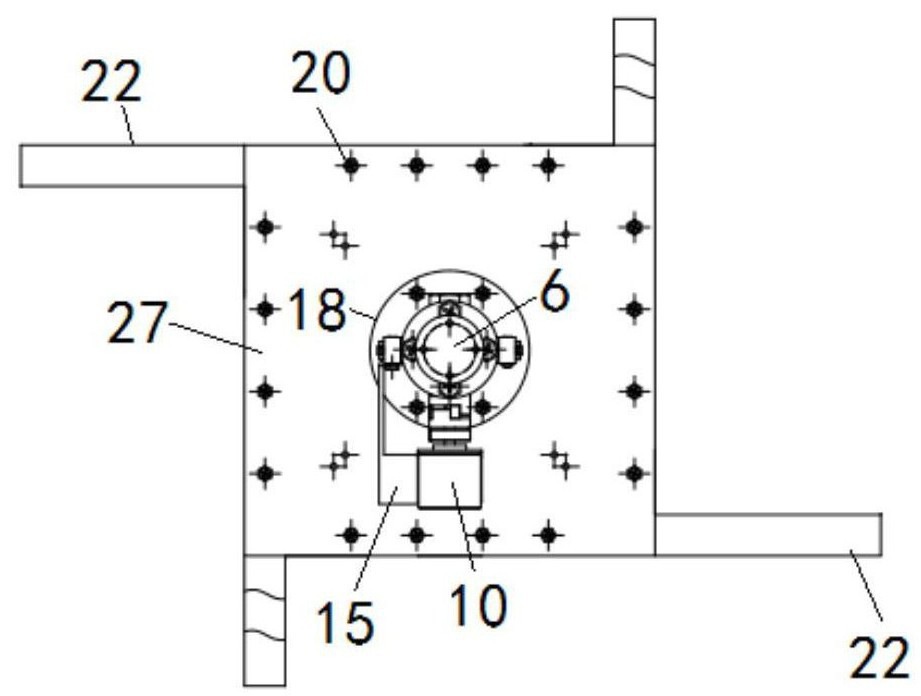
[0067] The frame part includes a support frame and a support plate 27, the support frame is welded by 4 first steel pipes 14, 4 second steel pipes 22 and 4 third steel pipes 26, and the 4 second steel pipes 22 are welded into a chassis, each One end of the second steel pipe 22 has an extension end, and four third steel pipes 26 are welded on the chassis. 14 welding.
[0068] The support plate 27 is placed on the top of the four first steel pipes 14 forming a rectangle....
Embodiment 2
[0109] Embodiment 2: A method for ground flight testing of a coaxial dual-rotor UAV, comprising the following steps;
[0110] Taking the test of coaxial dual-rotor UAV as an example, the specific operation process of the above-mentioned coaxial dual-rotor UAV ground flight test platform is as follows:
[0111] Before starting the equipment, add some sandbags to the second steel pipe 22 to prevent the platform from moving when the UAV is flying; connect the coaxial dual-rotor UAV to the UAV connecting seat 6; check whether parts of the platform are loose, etc. Situation; Calibrate the tension sensor 5 and the torque sensor 7; Connect each module of the sensing part with the development board according to the design scheme.
[0112] Turn on the power of the development board and run the host computer program. The two are initialized respectively to check whether the Bluetooth communication between the development board and the host computer is normal, and whether the data acqui...
Embodiment 3
[0128] Embodiment 3: as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 , Figure 7 , Figure 8 and Figure 9 As shown, a coaxial dual-rotor UAV ground flight test platform aims to reduce the degree of freedom of the platform, simplify the mechanical structure; add a variety of sensors, write data acquisition programs; add data receiving and data processing functions, etc. to reduce the Platform production costs, adding platform functionality.
[0129] A coaxial dual-rotor unmanned aerial vehicle ground flight test platform includes a mechanical part, a sensing part, a data receiving part and a data processing part. The sensor of the sensing part is placed in the mechanical part, and stm32 is used for data collection.
[0130] The above-mentioned ground flight test platform for ground drones includes mechanical parts, sensing parts, data receiving and data processing parts. The data receiving and data processing part uses the HC05 Bluetooth modul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More