

A humanoid robot system
A robot system and waist joint technology, which is applied in the field of humanoid robot systems, can solve the problems of high rigidity in control of the swing cylinder, few degrees of freedom, and no consideration of left and right swings, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
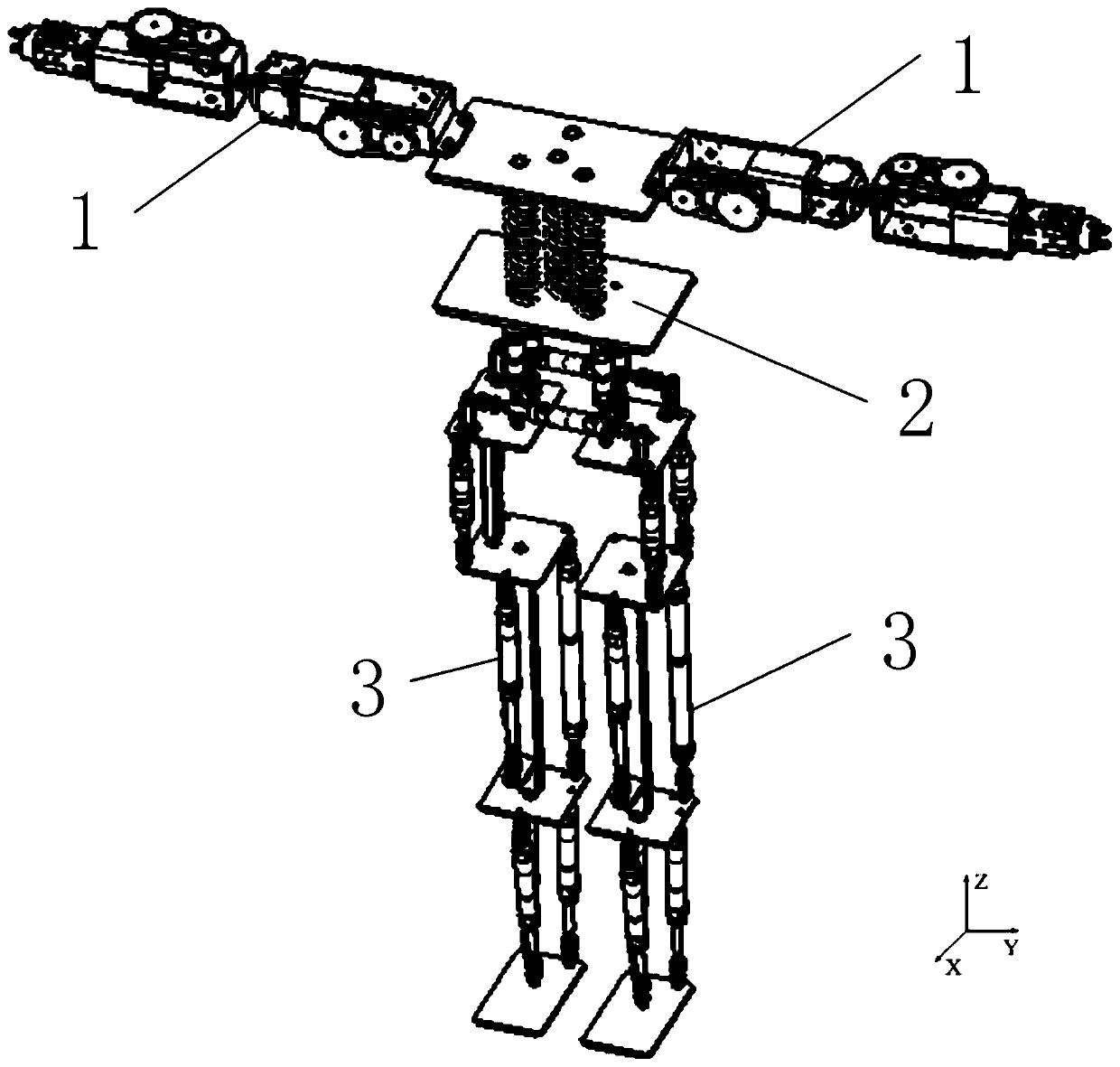
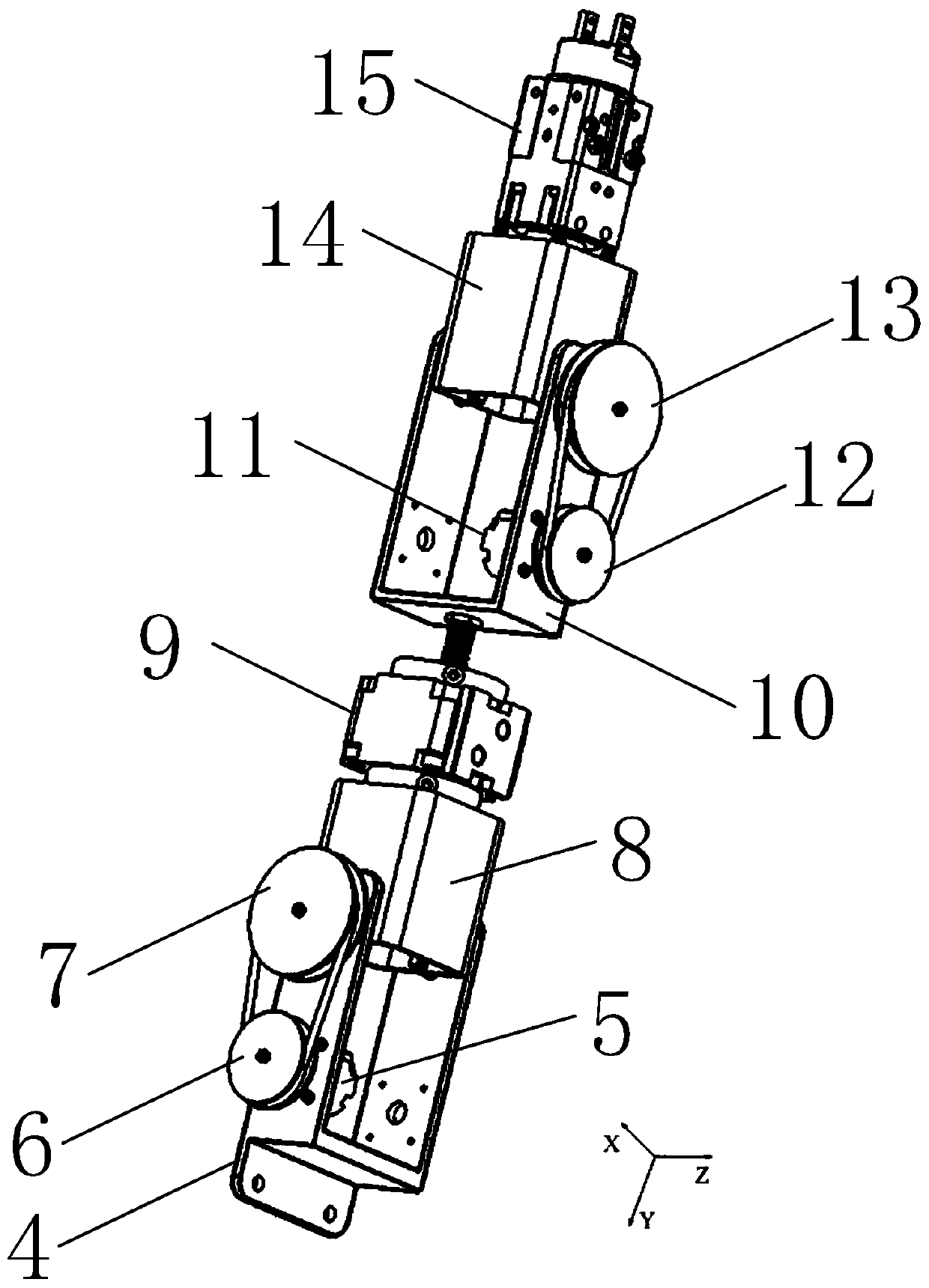
[0031]A humanoid robot system, comprising: a waist joint device 2, an upper limb device 1 is arranged on both sides of the waist joint device 2, and a lower limb device 3 is respectively arranged on both sides of the lower end; the shoulder joint fixture 4 of the upper limb device 1 is fixed on the waist joint On the device 2, the shoulder joint fixture 4 fixes the cylinder block of the first upper limb swing cylinder 5, and the rotation axis of the first upper limb swing cylinder 5 is fixed on the axis of the first pulley 6, and the first pulley 6 and the second pulley 7 Connected by a belt, the axis of the second pulley 7 is fixed on the shoulder joint connector 8, and is rotatably connected with the shoulder joint connector 4, and the shoulder joint connector 8 is fixed to the cylinder body of the second upper limb swing cylinder 9. The rota...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More