

3D exploration method based on wavefront algorithm
An algorithm and wavefront technology, applied in the field of 3D exploration based on wavefront algorithm, can solve problems such as low efficiency of boundary points
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
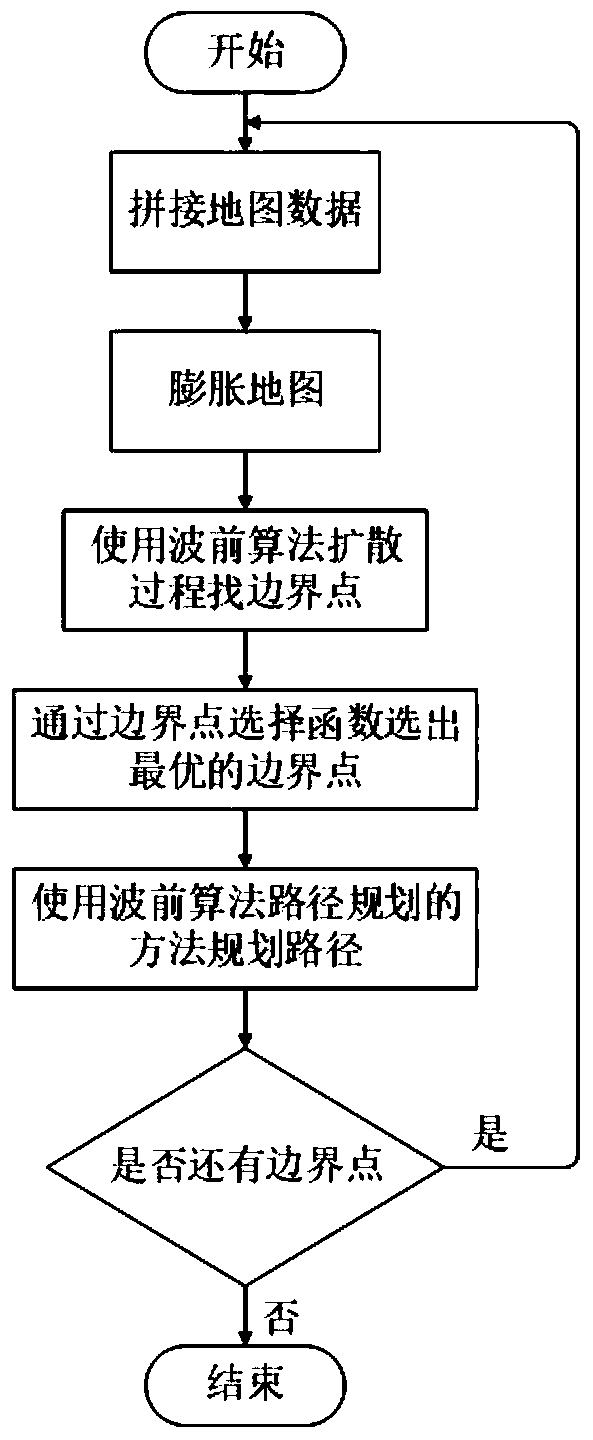
[0040] In order to achieve the purpose of the present invention, as figure 1 As shown, in one of the embodiments of the present invention, a method for 3D exploration based on wavefront algorithm is provided, including the following steps:
[0041] Step 1. Collect the data of the current environment map, and stitch each frame of data collected;
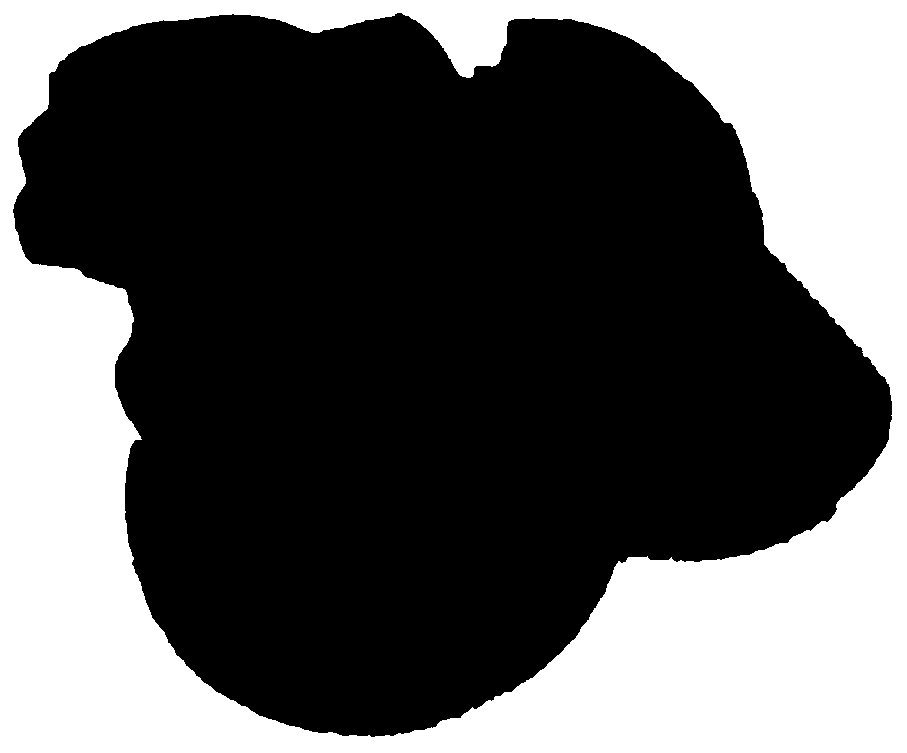
[0042] Wherein, the current environment is a three-dimensional space, and the map is a three-dimensional octomap map. In the step 1, a depth camera sensor is selected to obtain the current environment information, and the map is obtained by splicing data of each frame of the camera.
[0043] Specifically, such as figure 2 As shown, it is the octomap map obtained by splicing each frame of data acquired by the depth camera sensor. When constructing the map, the method of filling points has been used. When stitching the map, the pose information of the mobile robot is obtained from the odometer carried by itself.
[0044] Step 2, pe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More