

Magnetic control micro soft crawling robot and preparation and application method thereof
A technology of crawling robot and application method, which is applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., which can solve the problems of limited structural design of robots and restrictions on the application environment of robots, and achieve the effect of simple structure, easy control, and easy production
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
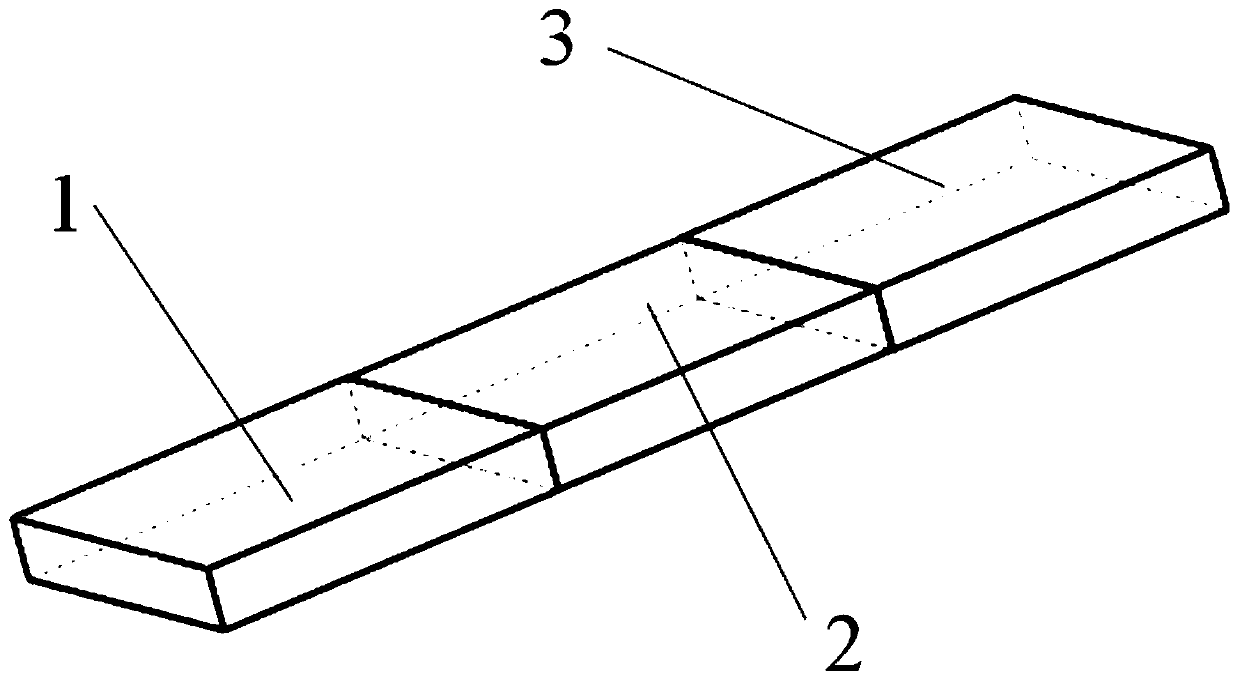
[0036] figure 1 Schematic diagram of the structure of the magnetically controlled micro soft crawling robot provided by the embodiment of the present invention;
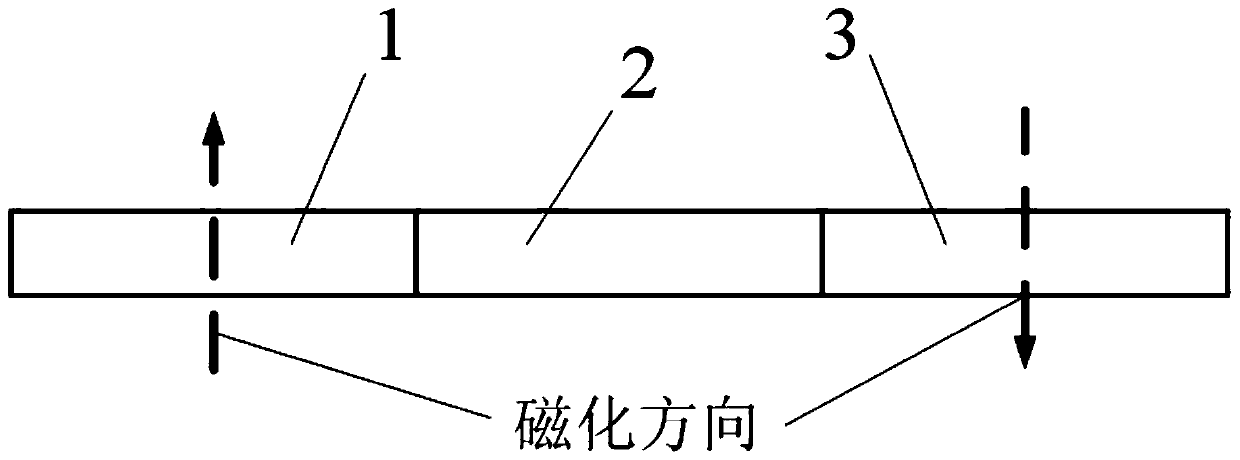
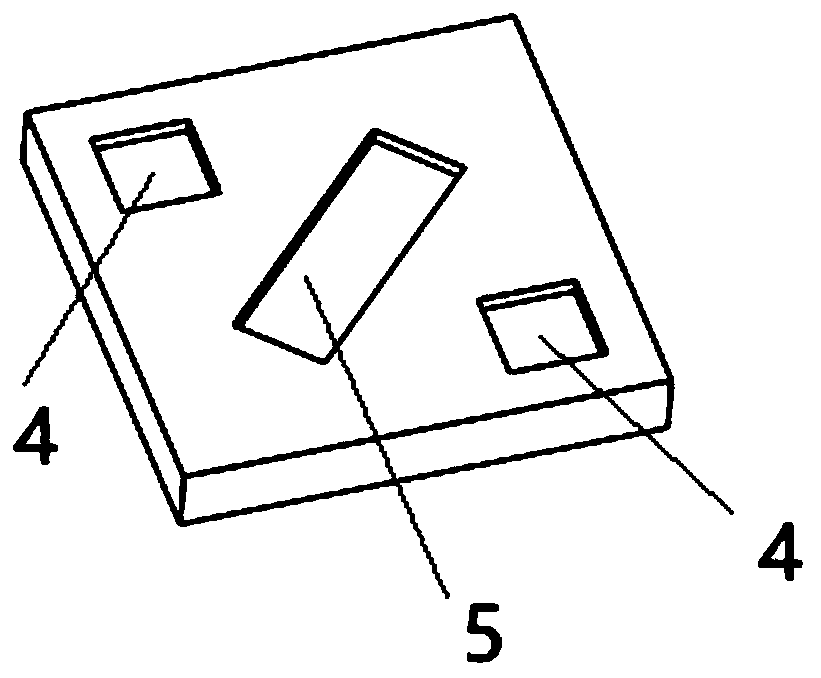
[0037] figure 2 A schematic diagram of the magnetization direction of the magnetically controlled micro soft crawling robot provided by the embodiment of the present invention; image 3 Schematic diagram of the mold structure for the preparation of the magnetically controlled micro soft crawling robot provided by the embodiment of the present invention; Figure 4 A schematic diagram of the structure of the magnetically controlled microsoft crawling robot that completes the contraction movement provided by the embodiment of the present invention; Figure 5 Schematic diagram of the structure of the magnetically controlled micro soft crawling robot provided by the embodiment of the present invention to complete the stretching motion; Image 6 A structural schematic diagram of the magnetically controlled micro soft c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More