

Aircraft route tracking method based on deep reinforcement learning
A technology of reinforcement learning and aircraft, applied in the direction of instruments, three-dimensional position/course control, vehicle position/route/altitude control, etc., can solve problems such as wind disturbance, poor performance, and few control methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0077] The aircraft route tracking method based on deep reinforcement learning proposed by the present invention comprises the following steps:
[0078] (1) Construct a Markov model for aircraft route tracking, including the following steps:
[0079] The Markov model of aircraft route tracking includes four components: state variables, control variables, transfer model, and one-step loss function;
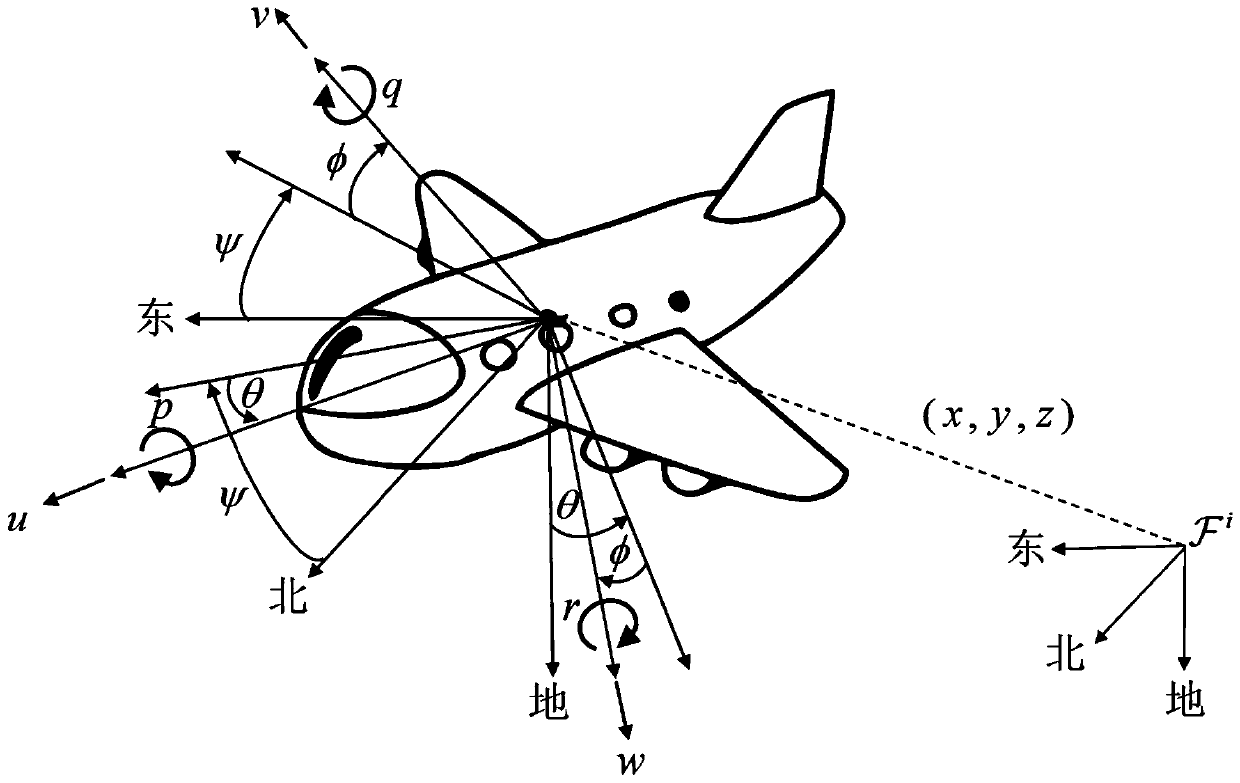
[0080] (1-1) Determine the state variables of the Markov model:
[0081] Such as figure 1 As shown, use (x, y, z) to represent the horizontal plane coordinates x, y and height z of the aircraft in the inertial coordinate system, and use Indicates the heading angle, pitch angle and roll angle of the aircraft in the inertial coordinate system, (p, q, r) indicates the three-axis velocity of the aircraft in the body coordinate system, and (u, v, w) indicates the aircraft in the body coordinate system The three-axis angular velocity under ;
[0082] Let the target height of the air...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More