

An Adaptive Fast Velocity Tracking Control Method for Uncertain Underwater Robots
An underwater robot and adaptive controller technology, which is applied in height or depth control, vehicle position/route/height control, control/regulation system, etc., can solve problems such as inability to guarantee limited time error convergence and low tracking accuracy, Achieve the effect of eliminating the need to obtain information, strong robustness, good robustness and tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
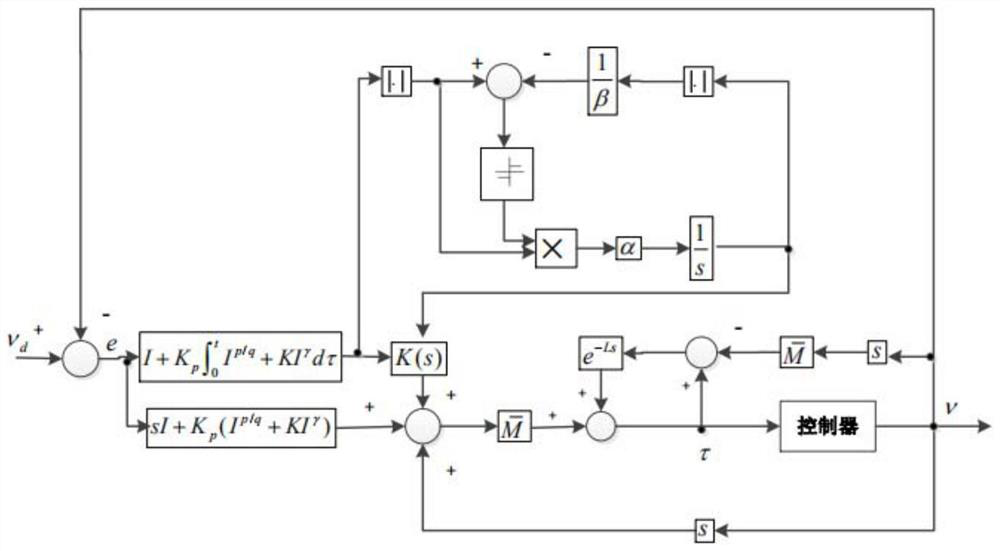
[0053] see figure 1 , the specific steps of a kind of adaptive fast speed tracking control method for uncertain underwater robot proposed by the present invention are as follows:
[0054] Step S1, aiming at the kinematics model of the underwater robot, design the control target according to the actual application requirements, and use the time delay estimation technology to estimate the uncertain part of the system model and external interference online;
[0055] Kinematics model of underwater robot:
[0056]
[0057] The parameters of the underwater robot system include: M∈R 6×6 is the mass inertia matrix, C(ν)∈R 6×6 is the Coriolis force and centripetal force matrix, D(ν)∈R 6×6 is the nonlinear damping matrix, g(η)∈R 6 is the gravity and buoyancy matrix, τ d ∈R 6 is the time-varying external disturbance, τ∈R 6 is the control input; η=[x,y,z,φ,θ,ψ] T ∈R 6 is the displacement and angle of the underwater robot in the static coordinate system, φ, θ, ψ are the roll an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More