

Automatic driving lane changing track optimization model, lane changing track optimization method and system
A technology of automatic driving and trajectory optimization, applied in combustion engines, internal combustion piston engines, control devices, etc., can solve the problems of lack of real-time feedback optimization control of vehicle lane changing, poor practicability of driving environment, etc., to improve self-adjustment and trajectory optimization capabilities , to ensure safe execution and strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0045] This embodiment provides an automatic driving lane change trajectory optimization model, based on the lane change space constraints, through the relationship between the lateral acceleration value of the automatic driving vehicle, the lane change duration, and the lane change trajectory The relationship between the length of the lane, the influence degree of the lane change trajectory, the longitudinal acceleration value of the automatic driving vehicle, and the horizontal space required for the lane change of the automatic driving vehicle, the lane change trajectory, and the required space for the horizontal direction, The influence degree of the lane change trajectory is configured.
[0046] This embodiment provides a method for optimizing lane-changing trajectory of automatic driving, the steps are:
[0047] Collect the driving data of the automatic driving vehicle, input the driving data into the above-mentioned automatic driving lane change trajectory optimization ...
Embodiment 2
[0075] The features of this embodiment that are the same as those of Embodiment 1 will not be described in detail. The features of this embodiment that are different from Embodiment 1 are:
[0076] The automatic driving vehicle is specifically an autonomous driving vehicle, and the construction of the automatic driving lane change trajectory optimization model includes:
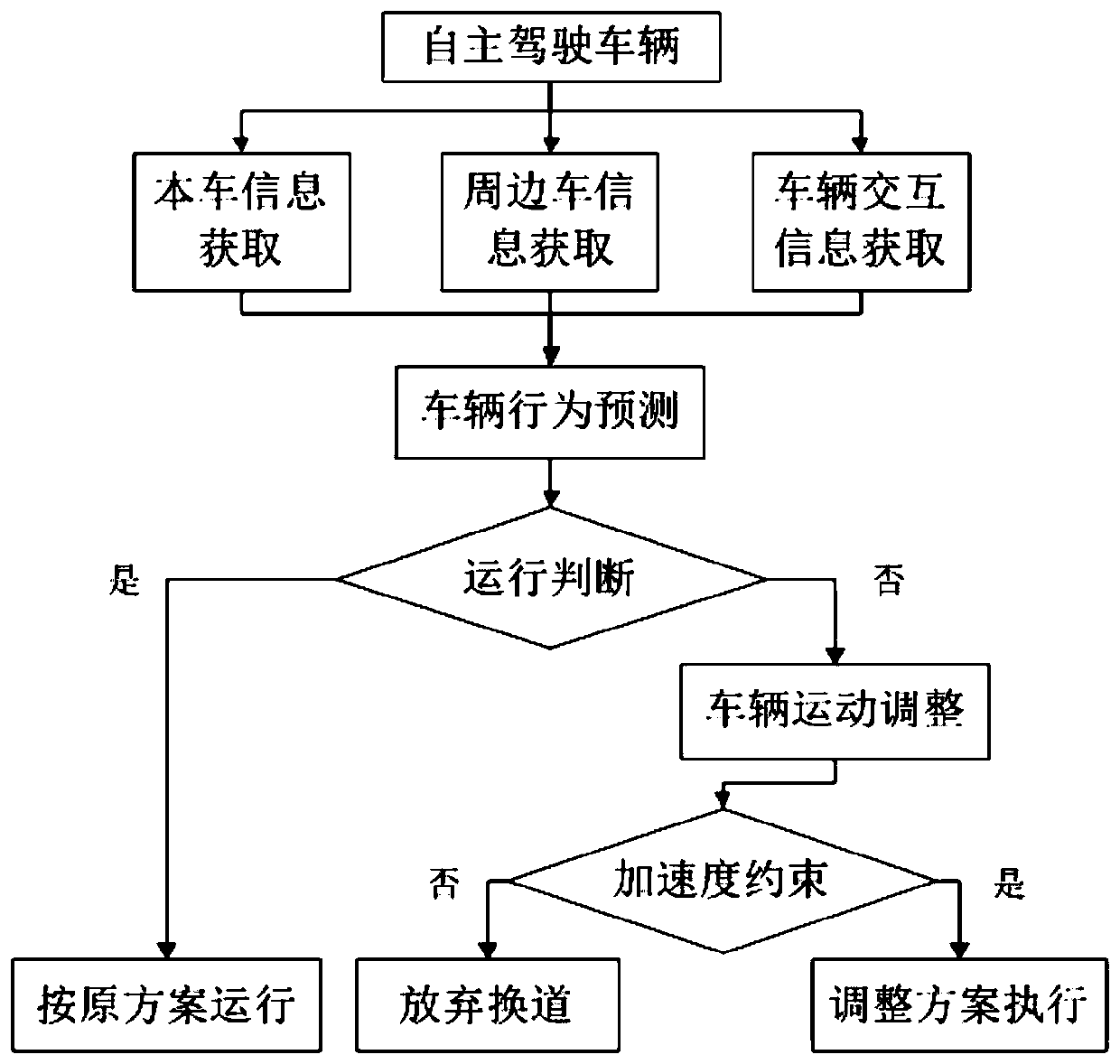
[0077] During the lane changing process of the self-driving vehicle, due to the influence of the surrounding vehicles, the lane changing demand may be met in the initial state, but the lane changing demand cannot be met during the lane changing execution process. Therefore, when a vehicle changes lanes, it is necessary to detect in real time whether its lane-changing space meets its lane-changing requirements. If the requirements are met, the original lane-changing scheme can be used to change lanes, but if the requirements cannot be met, it is necessary to adjust its model parameters or control in time strat...
Embodiment 3
[0129] The same features of the present embodiment and the second embodiment will not be repeated, and the different features of the present embodiment and the second embodiment are:
[0130] The autonomous driving model is adapted to the UC-winRoad driving simulator.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More