

Spacecraft proximity operation autonomous control method and system based on online learning
A technology for autonomous control and spacecraft, applied in the field of spacecraft control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
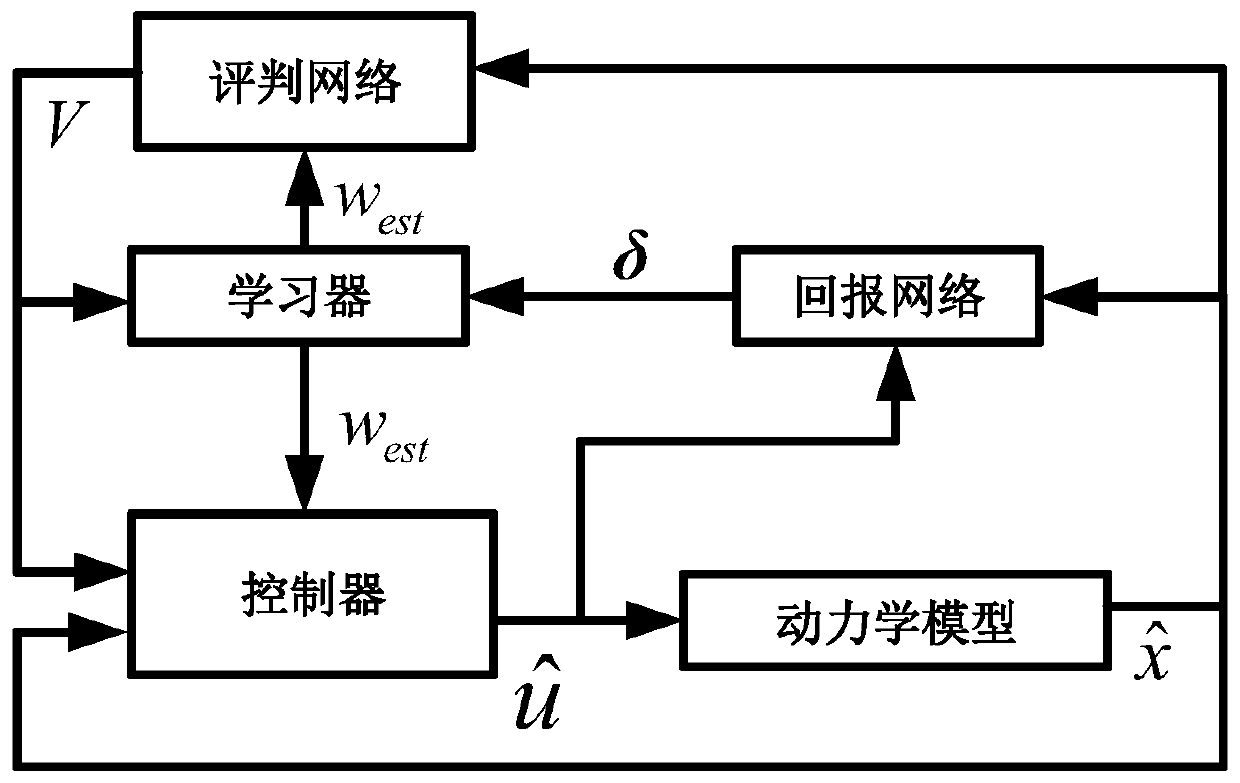
[0044] figure 1 It is a schematic block diagram of the autonomous control system of spacecraft approaching operation based on online learning according to the present invention. The above-mentioned system is composed of a judgment network, a reward network, a learner, a controller, and a relative pose dynamic model of a spacecraft. First, the spacecraft is controlled by the initial controller, and the control performance is evaluated by the data collected by the evaluation network and the reward network. At the same time, the learner performs real-time learning of the network weights through the evaluation results, and updates the control parameters to the controller. Realize online performance improvement.
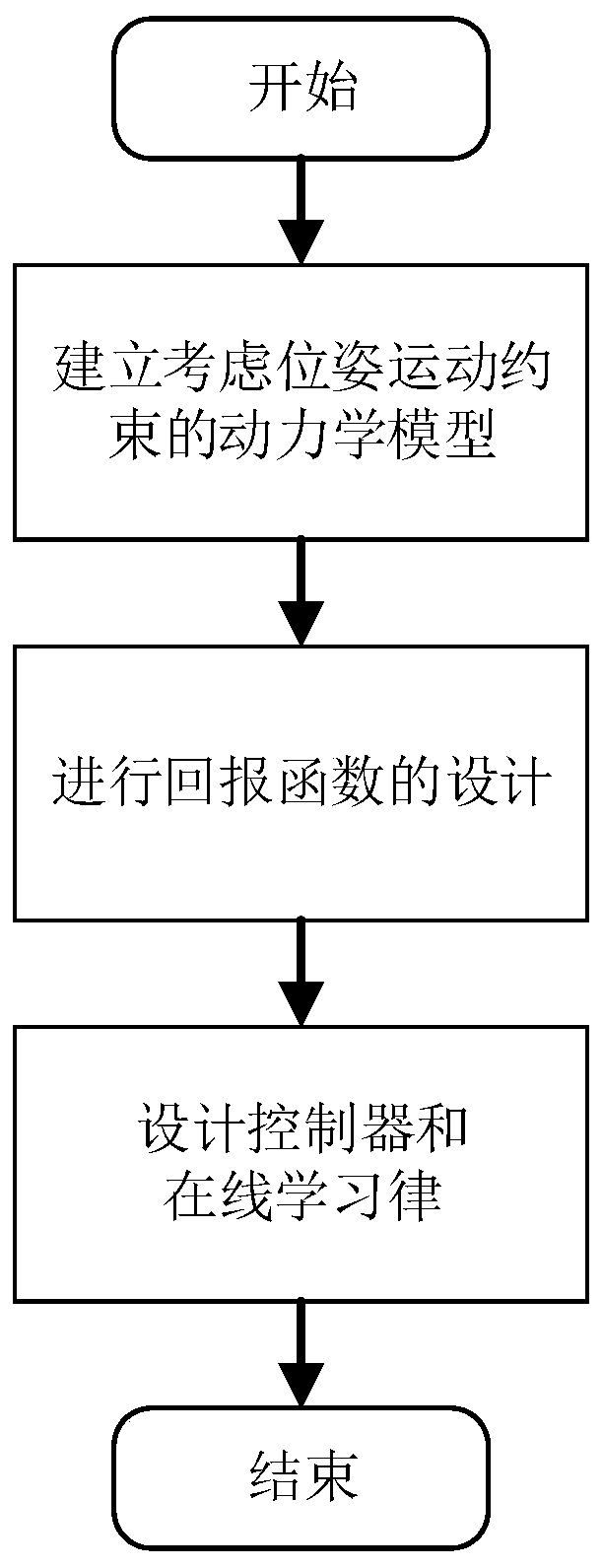
[0045] like figure 2 As shown, the steps of an autonomous control method for spacecraft approaching operations based on online learning in the present invention are as follows: firstly establish a pose dynamics model of the spacecraft approaching operation task consider...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More