

Calibration method for strapdown inertial navigation installation attitude of photoelectric tracking system
A technology of photoelectric tracking system and strapdown inertial navigation, which is applied in the direction of measuring device, navigation calculation tool, and navigation through speed/acceleration measurement, etc. Errors are not easy to guarantee and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
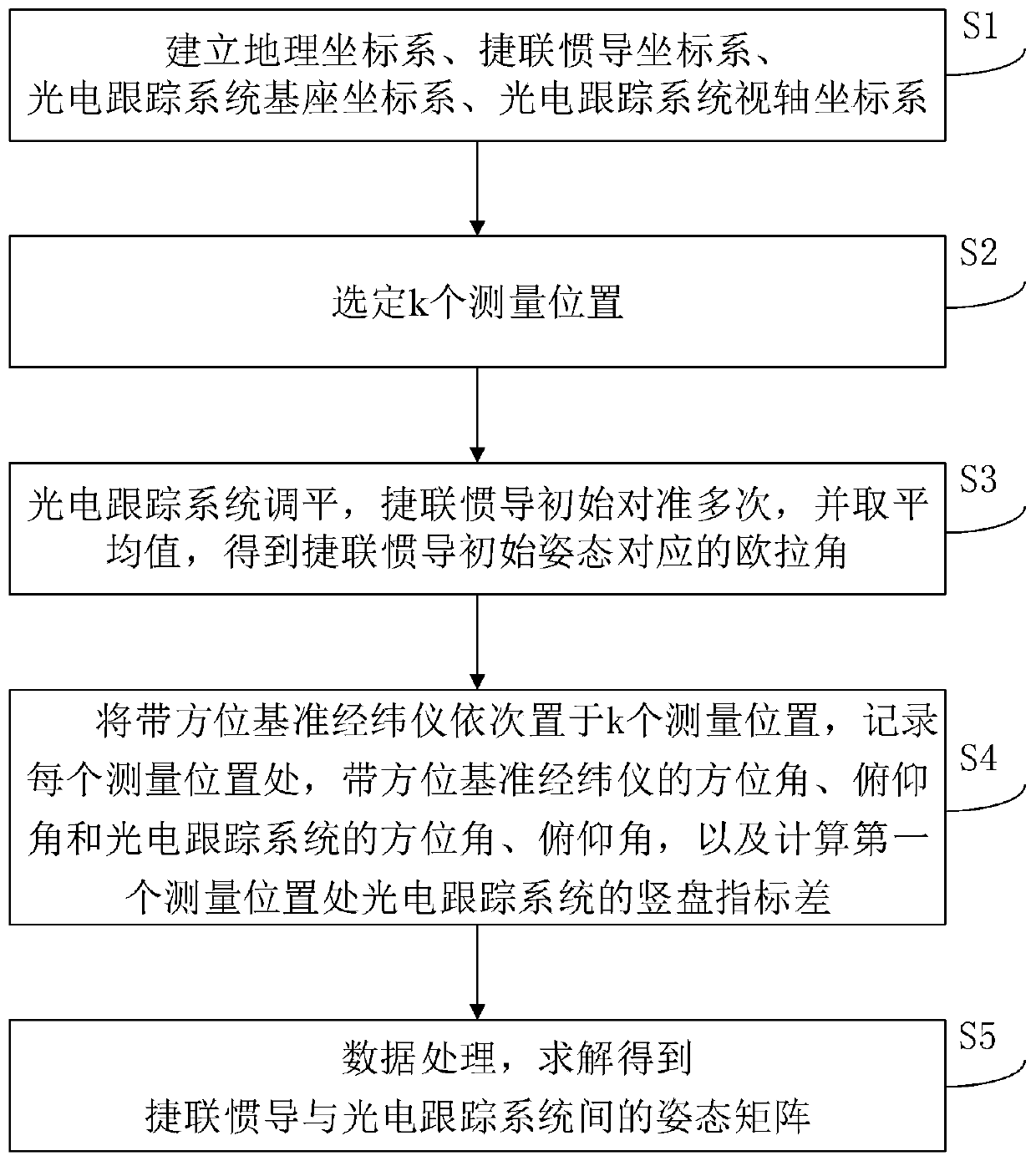
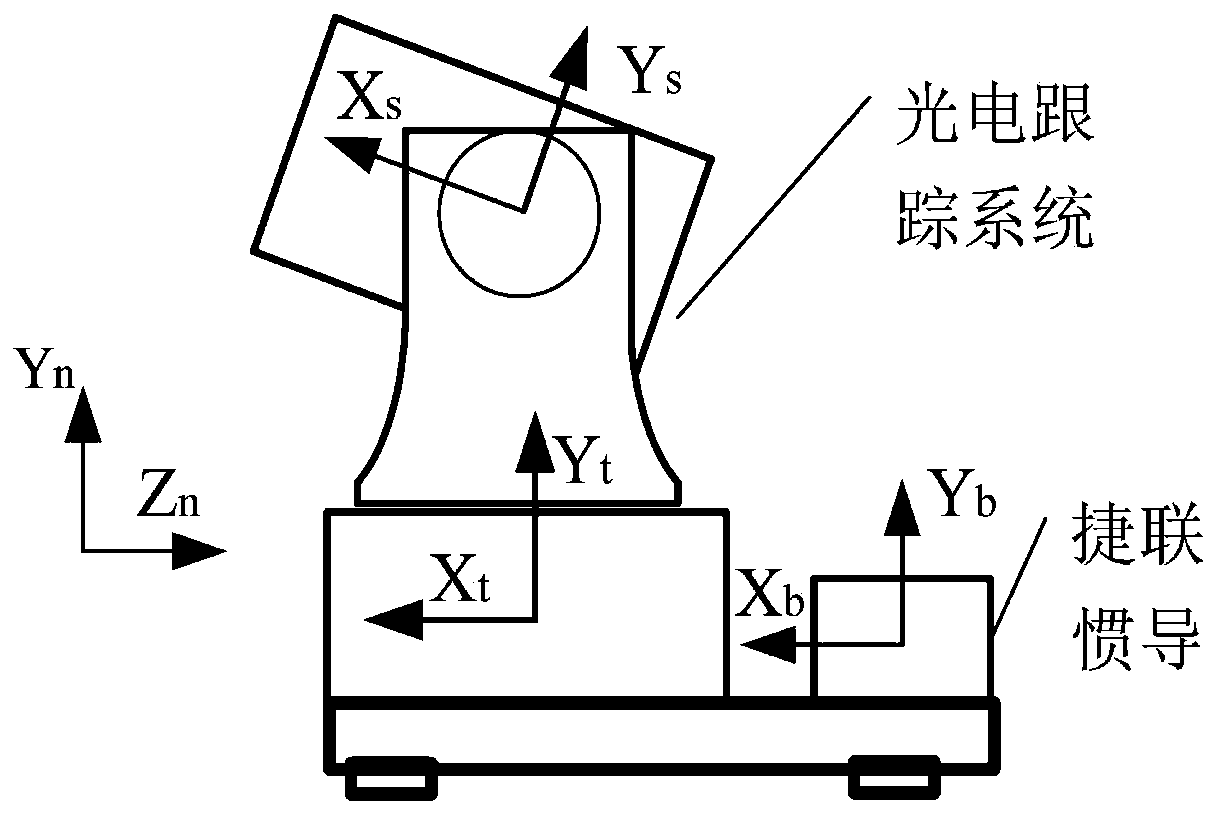
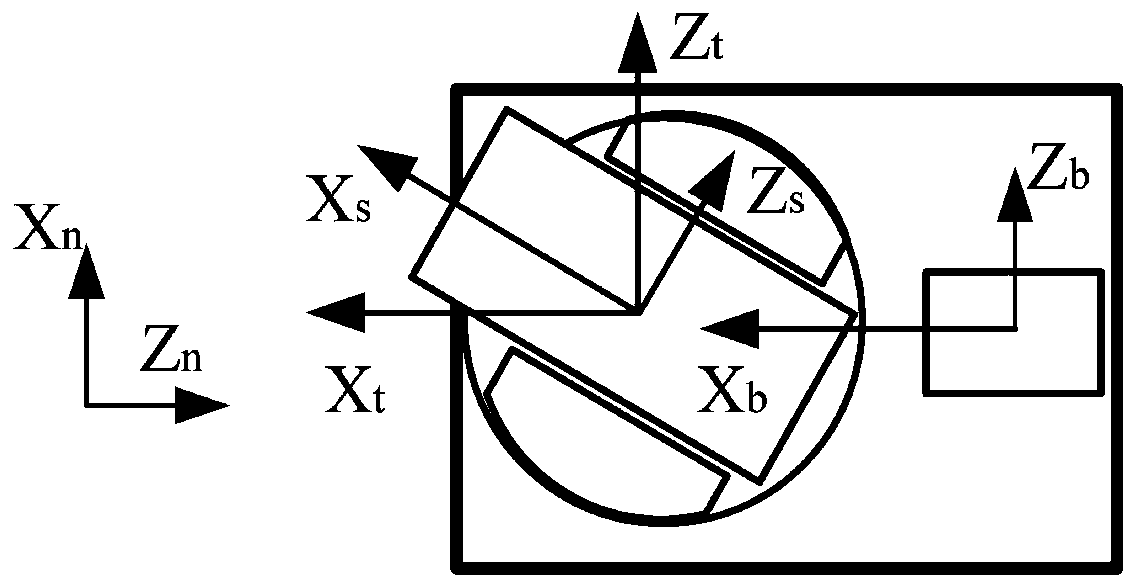
[0062] An embodiment of the invention provides a method for calibrating the installation attitude of a strapdown inertial navigation system for a photoelectric tracking system.
[0063] The present invention adopts gyro theodolite to provide azimuth and horizontal reference (or adopts the combination of autocollimating theodolite and north finder to provide azimuth and horizontal reference), and calibrates the attitude matrix between strapdown inertial navigation and photoelectric tracking system.
[0064] The train of thought of the present invention is: take the geographical coordinate system as a bridge, establish the connection between the two by seeking the expression of the boresight vector of each position under the strapdown inertial navigation and photoelectric tracking system; then calculate the photoelectric tracking system and strap...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More