

Real-time planning method for local driving route of unmanned vehicle in field environment
A driving route and route planning technology, applied in the directions of road network navigators, measuring devices, instruments, etc., can solve problems such as increasing the calculation cost, affecting the time to reach the destination, affecting the trajectory planning speed planning, etc., to optimize the distance and time cost. , the effect of improving the success rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described below in conjunction with the accompanying drawings, constituting a part of the present invention. It should be understood that what is described here is only a specific example of the present invention, and is not intended to limit the protection scope of the present invention. Any equivalent replacement or improvement made within the spirit and principles of the present invention, etc., All should be included within the protection scope of the present invention.
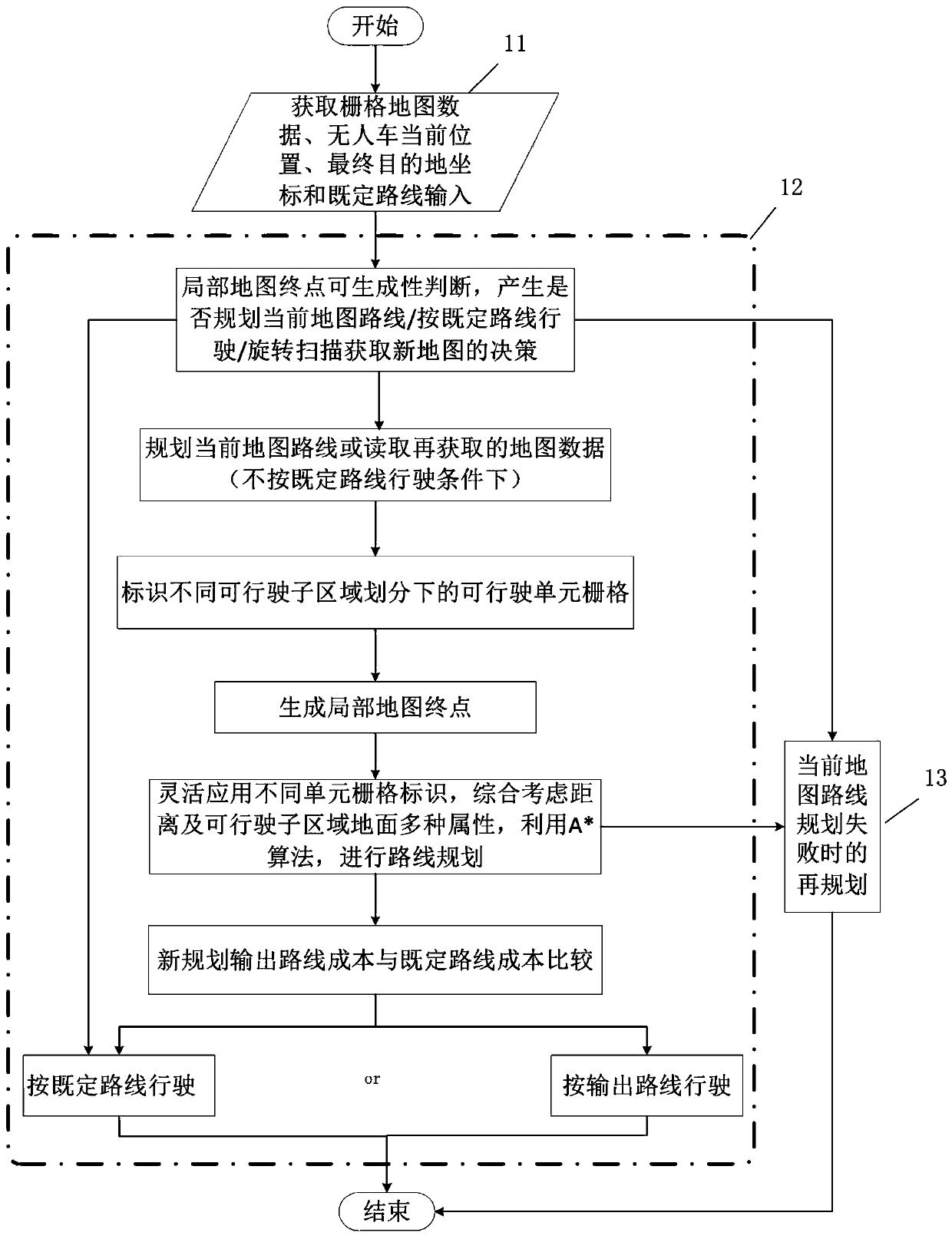
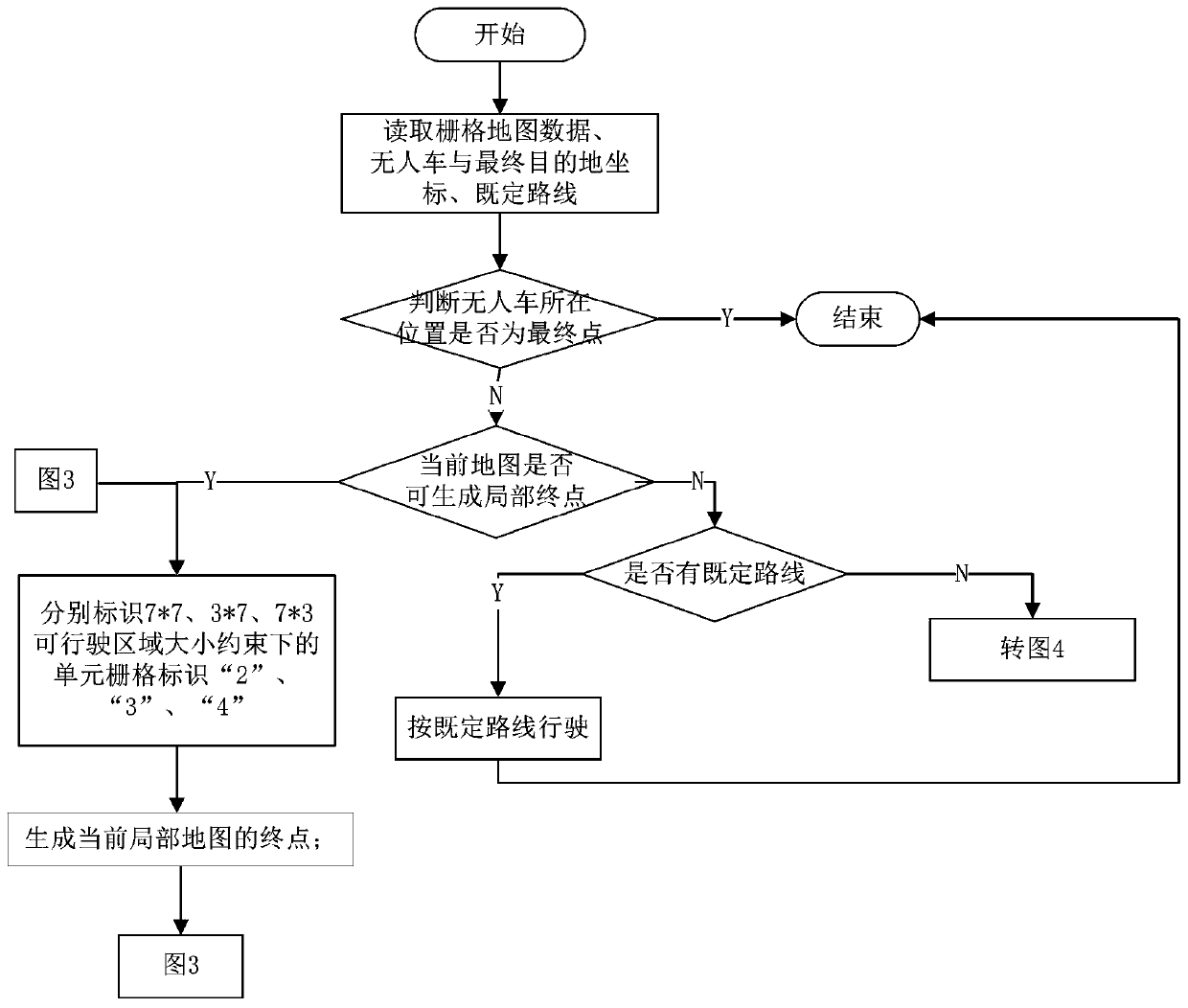
[0019] Such as figure 1 As shown, the real-time planning method for the local driving route of the unmanned vehicle under the field environment provided by the embodiment of the present invention mainly includes 3 steps:
[0020] Step 1, obtain relevant data: obtain raster map data, the current location of the unmanned vehicle, the final destination coordinates and the input of the established route;
[0021] Step 2, if the end point of the local map cannot b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More