

Control method and device of carrying system, computer equipment and storage medium
A technology of handling system and control method, which is applied in two-dimensional position/channel control, non-electric variable control, control/regulation system, etc., can solve the problems of low paving accuracy and low paving accuracy of brick laying robots, etc. Achieve the effect of improving the accuracy of paving, avoiding errors, and reducing global cumulative errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] In order to make the purpose, technical solutions, and advantages of this application clearer, the following further describes the application in detail with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the application, and not used to limit the application.
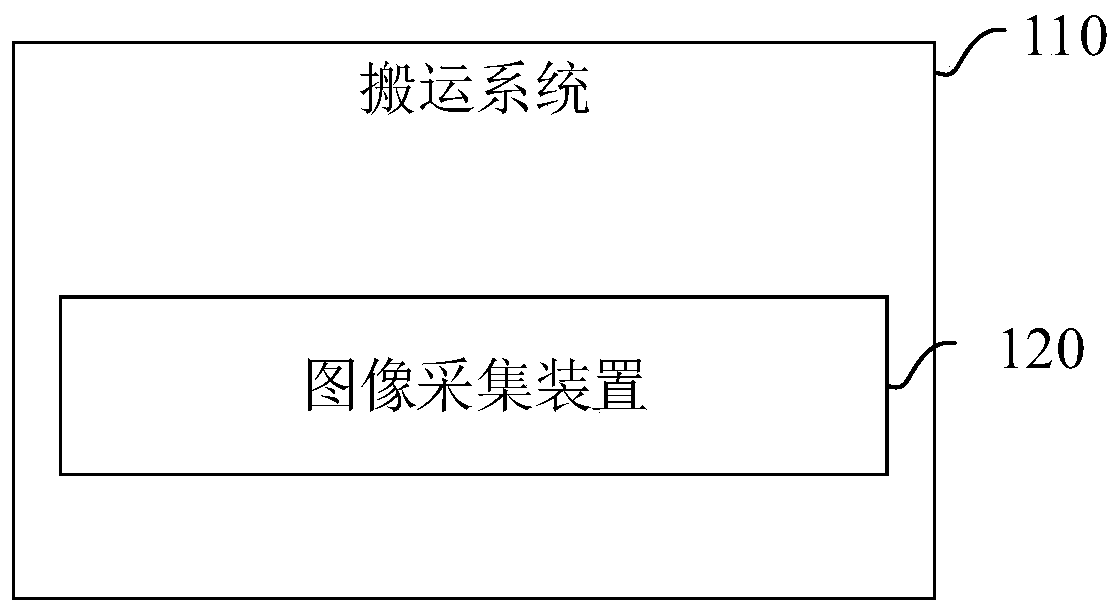
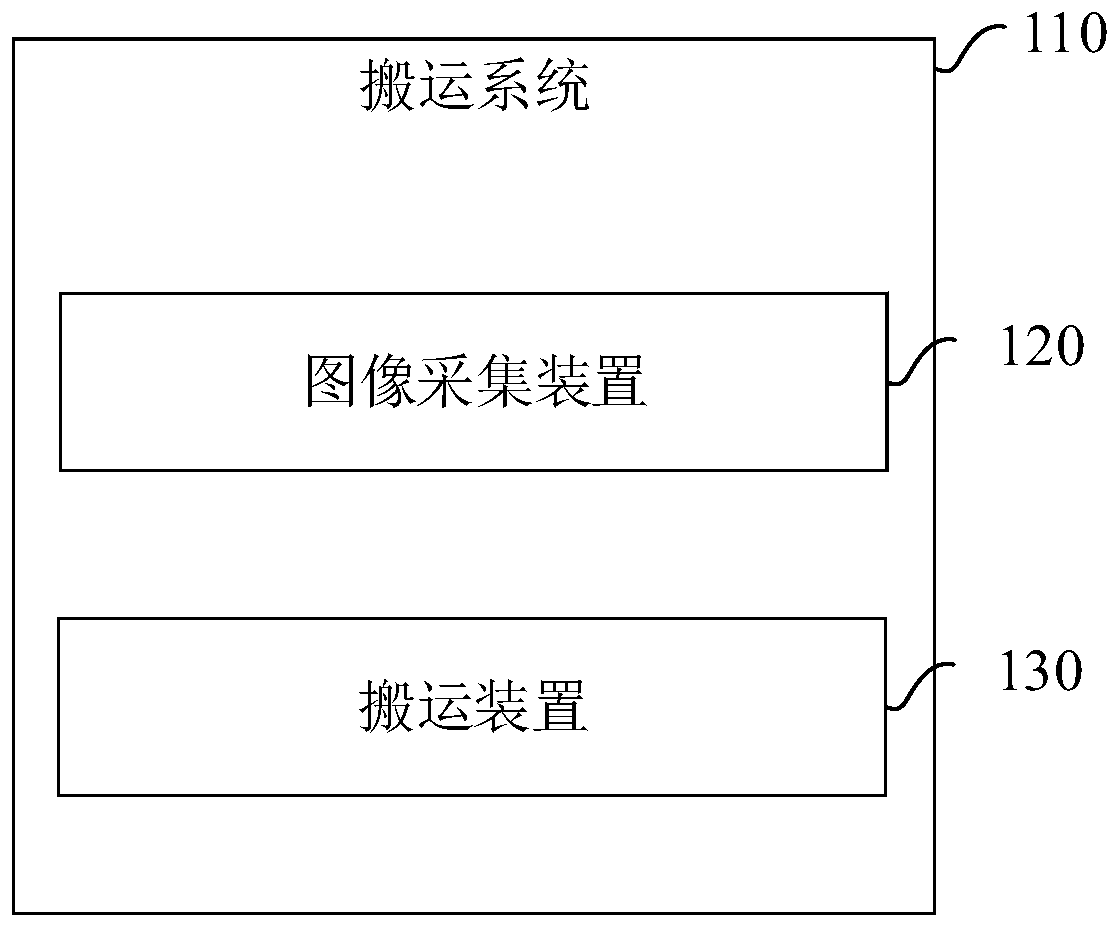
[0050] The control method of a handling system provided by this application can be applied to figure 1 In the handling system shown. Wherein, the handling system 110 includes an image acquisition device 120; in practical applications, the handling system may refer to a handling robot for handling an object to be moved, and the handling robot includes an image acquisition device 120. The image capture device 120 may be provided on the main body of the transport robot.
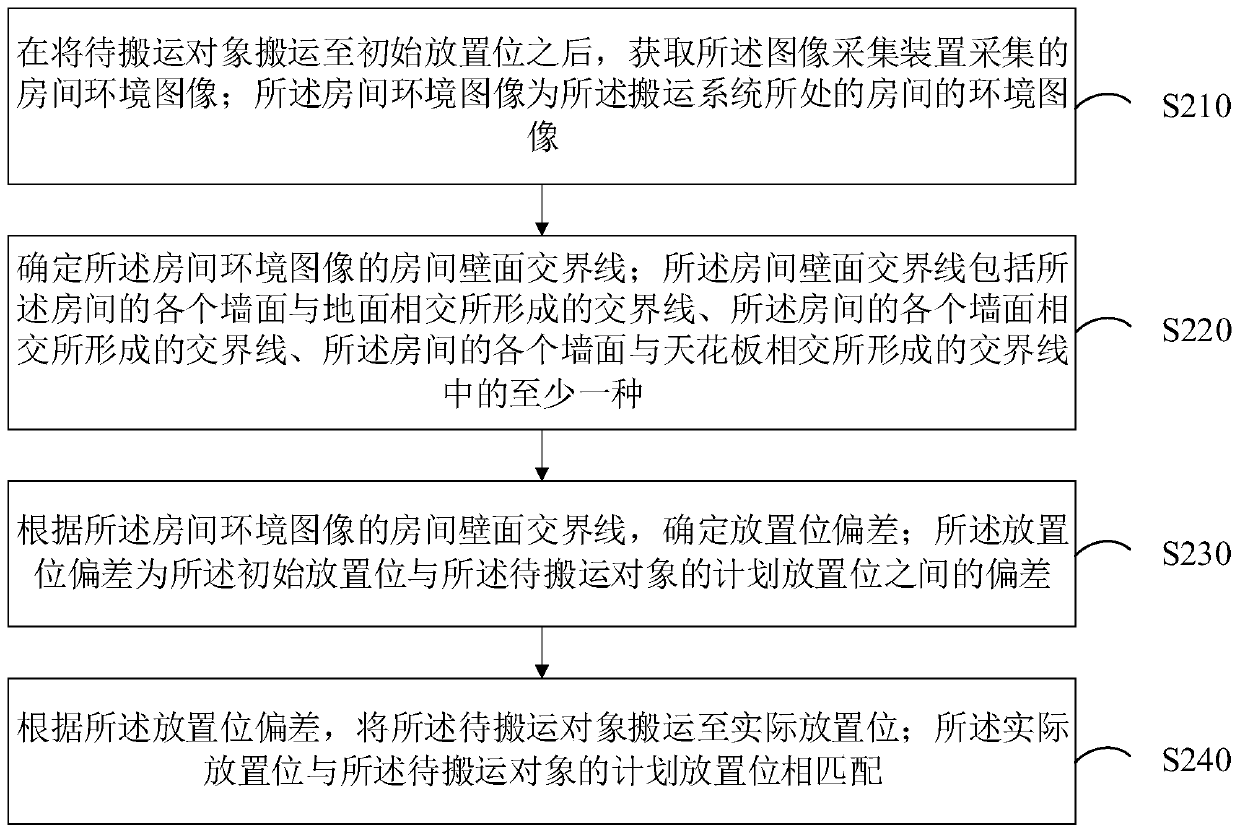
[0051] In one embodiment, such as figure 2 As shown, a method for controlling a handling system is provided. The handling system includes an image ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More