

Unmanned aerial vehicle night plant protection method based on multi-view vision
A multi-eye vision and unmanned aerial vehicle technology, applied in the field of aviation system, can solve the problems of many human resources, low plant protection efficiency, influence, etc., and achieve the effect of flexible disassembly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0042] In order to make the purpose, content, and advantages of the present invention clearer, the specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
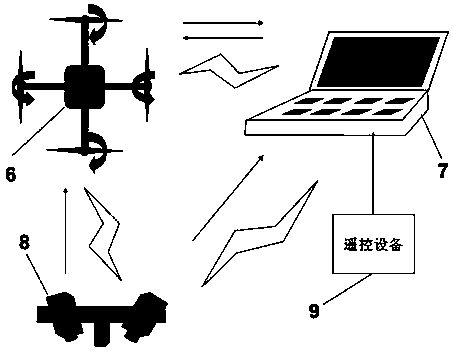
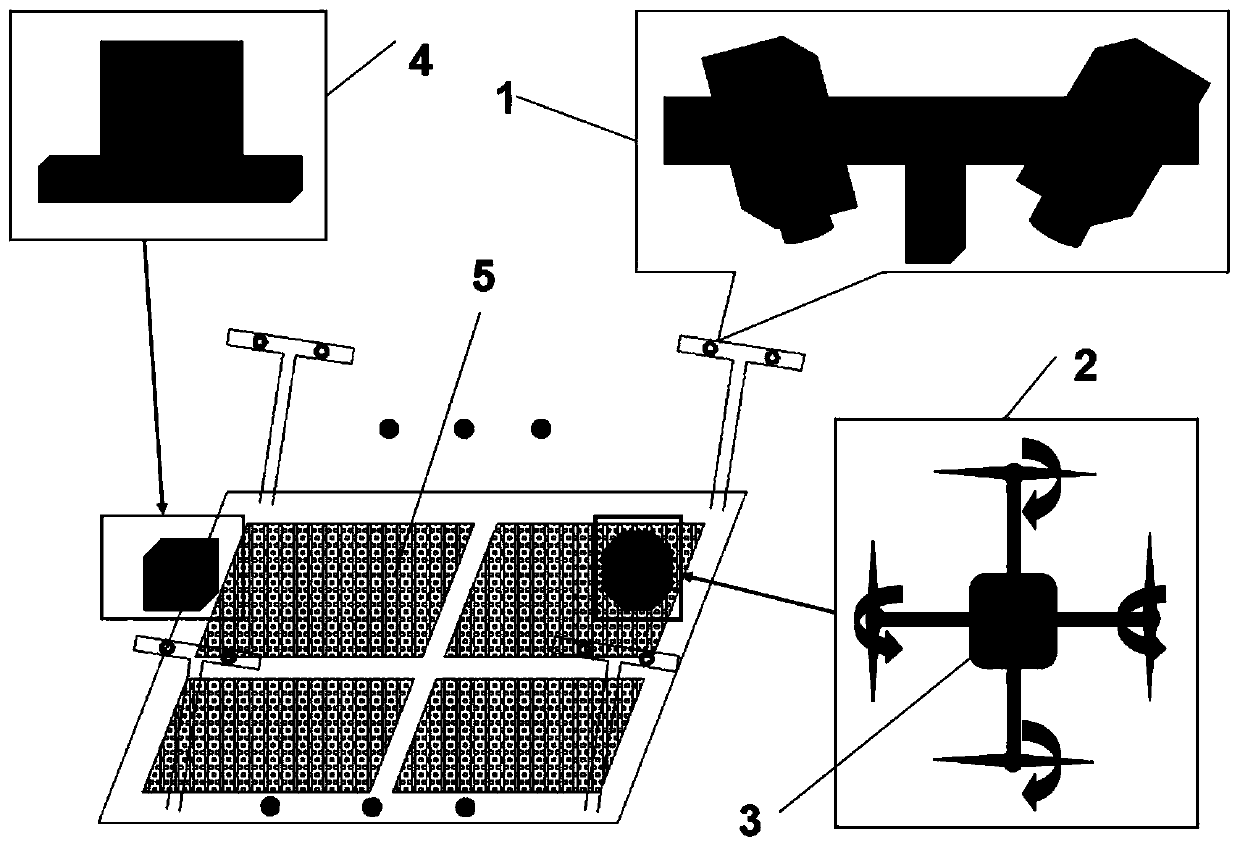
[0043] Such as figure 1 As shown, the multi-eye vision-based UAV nighttime plant protection method described in the present invention is mainly applied to the UAV position calculation and navigation during the UAV nighttime plant protection operation. The method mainly involves objects: a multi-eye vision platform 1 , a plant protection UAV platform 2 , a pesticide spraying platform 3 , a ground control platform 4 , and farmland to be protected 5 .
[0044] The plant protection unmanned aerial vehicle platform 2 is a flying platform for unmanned aerial vehicle plant protection operations, which is used to carry the pesticide spraying platform 3, visual positioning mark points, ultrasonic barrier equipment, and visual b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More